Hello everyone.
I would like to request for your help and comments on building traditional helicopters.
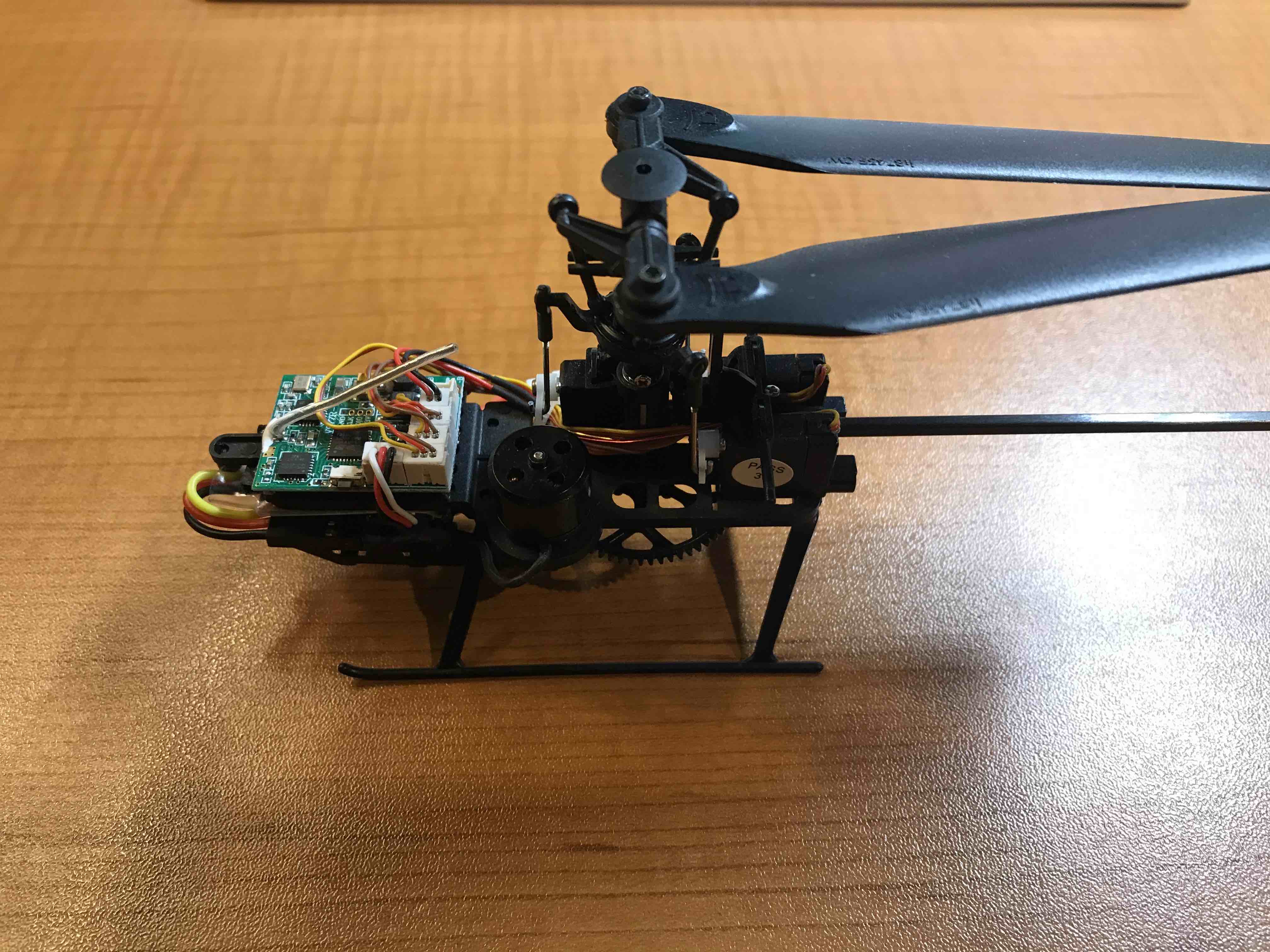
As for my project, I am trying to modify an XK K110 with a goal of making a micro traditional helicopter with FPV, altitude hold, and obstacle avoidance. FC, main motor, and ESC of the K110 will be replaced.
My initial request is regarding wire connections of the servos, tail rotor, and other peripherals to the replacement flight controller. (Not really sure if the parts are compatible, but most of it came from the Arducopter parts list, except for the ESC, Rx, battery, cam, and Vtx)
I have the following parts for the project:
- Main heli: XK K110 (servos, frame, rotor set, and tail set will not be replaced)
- FC: Holybro Kakute F7 Mini
- Main motor: 1106-11,000 kV brushless motor (K120 motor)
- ESC: ZTE Mantis
- Receiver: FrSky R-XSR
- Battery: Admiral 250 mAH
- GPS/ Compass: Matek M8Q-5883
- Optical Flow Sensor: Hereflow
- Altitude Hold Sensor: Matek Sys Optical Flow Lidar Sensor
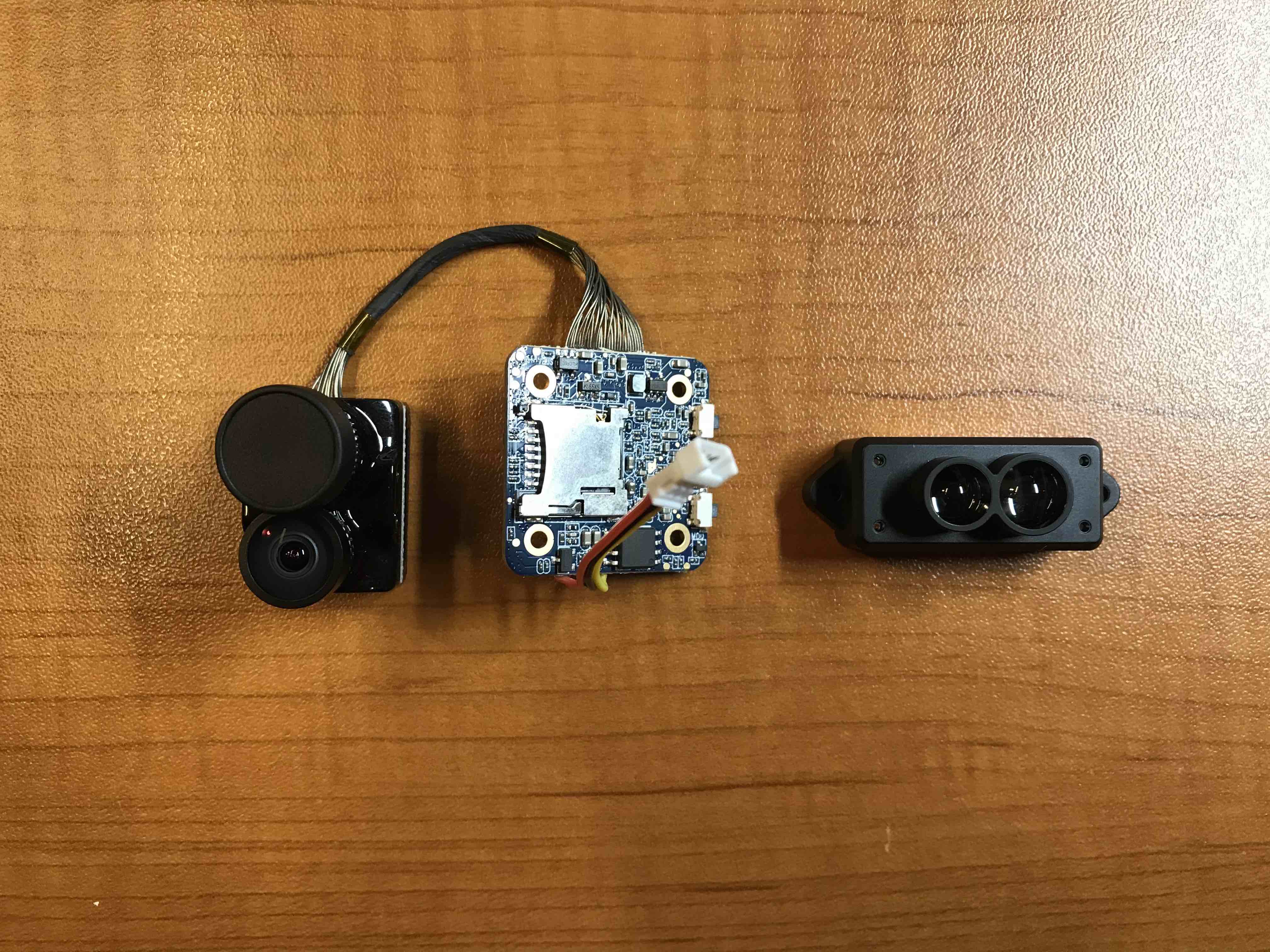
- Obstacle Avoidance Sensor: BENEWAKE TF Mini
- Camera: Run Cam Hybrid- Dual HPV Camera
- Video Transmitter: Holybro Atlatl Mini 5.8 GHz
I hope I can get your inputs and comments.
Thank you very much.