Dear All,
Datalog file of a crashed electric quadplane is attached in this link
(00000065.BIN - Google Drive)
(Dropbox - 00000065.BIN - Simplify your life)
Kindly help to identify the cause of crash.
It is apparent that the wind was around 11-12m/s during the flight.
Q-Assist speed prevented stall during loitering (circle) in guided mode for 4 to 5 times. The operator was not aware of this problem and continued the flight.
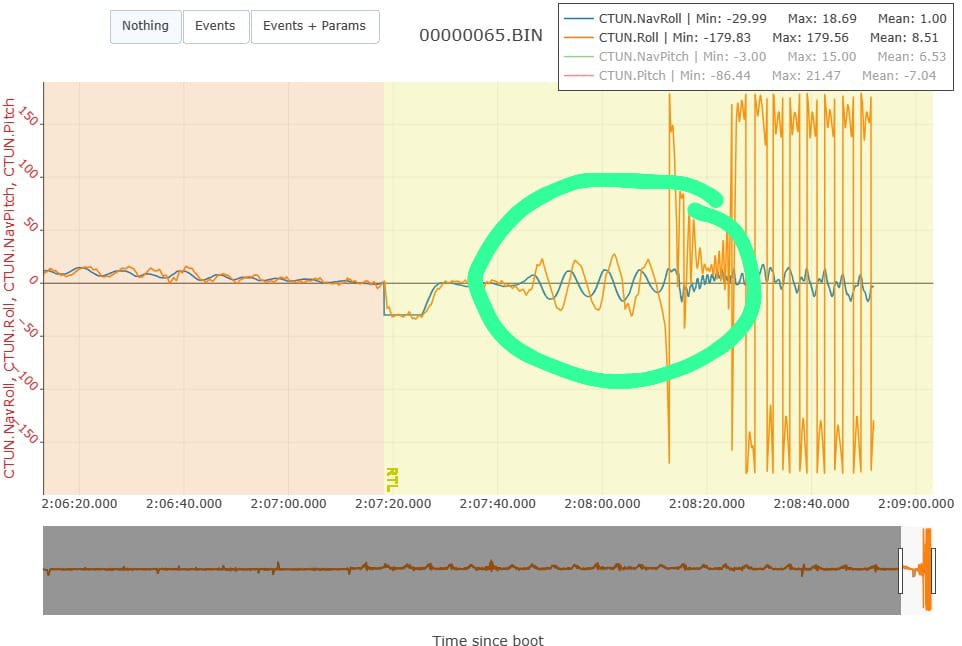
The accident happened when plane started to fly back home in RTL mode. The moment plane took turn to align itself towards home the airspeed decreased and oscillations (3 to 4 times) in Roll axis were observed first followed by oscillations and in Pitch axis. after that the airspeed reached below the stall speed and plane entered into a rolling dive and crashed.
Following are the questions which I cannot understand:
Why Q-assist speed was not engaged this time?
Q-Assist Angle do get engaged but failed to recover the plane?
I’m going to throw out my guess first to see if it gets shot down. I’m going to say I think you had a mechanical failure, likely part or all of the left wing failed, possibly the spar broke or separated from the wing. I’m guessing there isn’t much left of the plane, but can you see anything like that in the wreckage?
This would explain why
1.Q-Assist speed wasn’t engaged because the airspeed was fine, in fact it was diving pretty fast towards the ground.
2. If the wing failed the lift motors would not be able to help
3. I think it wasn’t stalling, airspeed was high as it dived to the ground.
I’m also suspicious that your airspeed sensor might not have been calibrated correctly. If that’s correct, it possibly helped cause the problem by reacting extremely (e.g. triggering Q-Assist), when it didn’t need to.
I have checked the wreckage and all airframe parts have been recovered from the place of crash. This means that none of the part of airframe got separated from the airframe. However, there is a chance of some mechanical failure due to which quad motors (triggered by Q_Assist_Angle) were not able to recover the plane.
You are also right about the airspeed sensor data. Seems calibration was out. Flight computer was unable to maintain level flight speed throughout the flight and Q_Assist_Speed was triggered multiple times and the misssion continued.
From the datalog it is clear that the plane pitched up after making a turn while coming back to home in RTL mode. At the same time airspeed also decreased which resulted in a stall. Oscillations in roll angle can also be seen concurrently. Then finally plane dived to the ground after stall.
The Paramters settings for speed were:
Trim_arspd_cm value: 1800 (level flight speed 18m/s)
Q_Assist_Speed: 14 m/s
So i am still wondering about the following:
While returning back home the Cruise Airspeed sensor value became less than the Q_Assist_Speed. As per the settings of Flight computer, Quad motors should have been activated exactly as they have been activated multiole times before irrespective of the fact that airspeed sensor was not calibrated properly.
In order to prevent stall, flight computer should increase throttle and add down pitch. However, we can see positive desired pitch command from the flight computer. So it looks like the Flight computer generated wrong value for desired pitch. I will share the snapshot of the log file to better understand. By the way has anyone experienced something like this before?
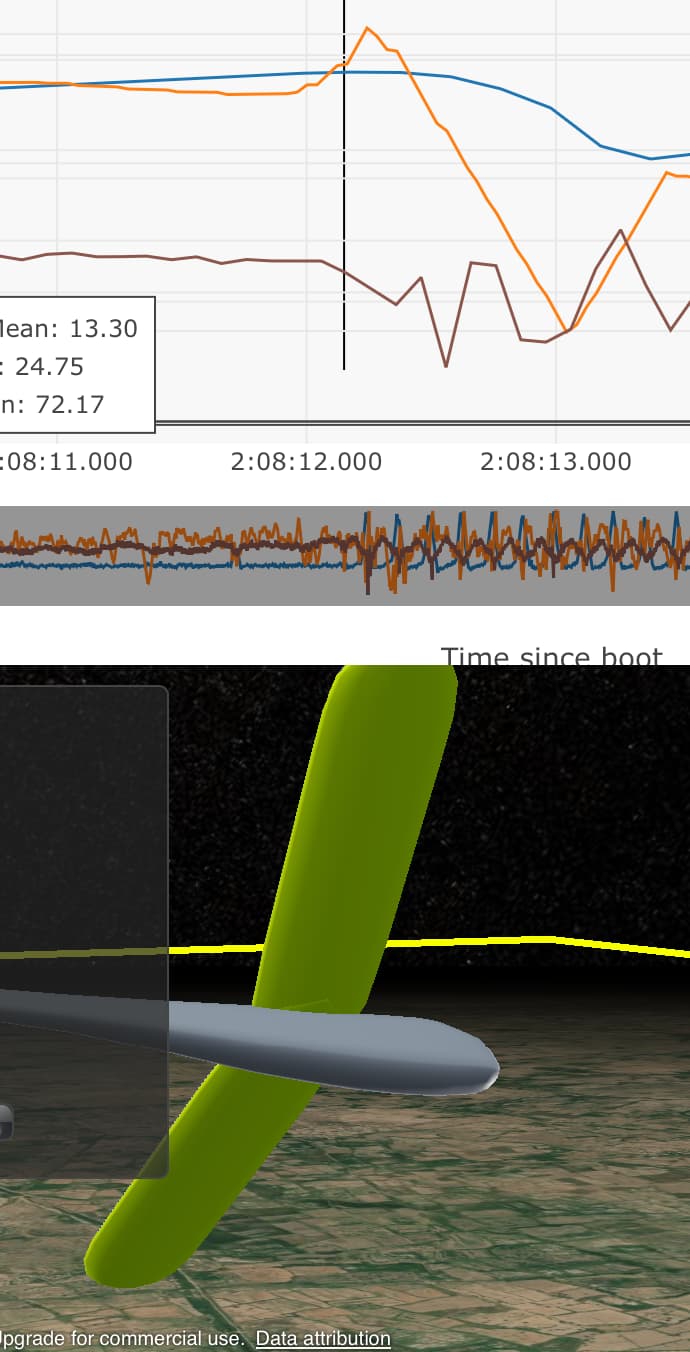
At this point, you can see the left wing has already started to drop, this is before the airspeed drops and the plane throttle increases. This is why I think there was a problem with the left wing. It’s at a critical time so hard to be sure, but if you zoom in to this part of the log, I think I can see that the left wing dropping comes first.
I’m going to agree with @timtuxworth that this is some kind of mechanical failure. The uncommanded roll and pitch change happen before the drop in speed, so unlikely to be a stall.
For the record, regarding your questions about stalls, ArduPlane is really good at preventing stalls from happening. When properly tuned the controller will maintain minimum speeds and even adjust pitch angles and speeds during banks and low throttle to give a margin of safety. I won’t say you can’t stall a tuned plane, but you almost have to be trying. However should a stall occur, ArduPlane is really bad at doing anything about it. The flight controller doesn’t have a method to actually recognize that a stall has occurred so it continues to try to maintain the flight attitude as before. As you’ve pointed out, this is the wrong thing to do in a stall.
I am wondering what could be the cause of triggering oscillations (3x times) which resulted in roll control failure (mechanical failure) after the RTL command?