hi, I am working on a Design of Hexacopter with IC Engines, i would like to understand whether Flight Controllers can be used instead of ESC and Motors then to use only servo to control throttle and get feedback from Engine on the RPM.
may kindly advice Flight controller for 6 servo throttle control and input from Engine for RPM.
If you want to use IC engines, then look at using them for a generator to power the electric motors, or look at a helicopter/pitch controlled system. I agree that IC engines will not have the responsiveness needed to fly a fixed pitch multirotor.
There are examples of IC powered multirotors working, I agree these sorts of motors aren’t a great choice compared with electric motors.
amazingdiyprojects on YouTube made an octocopter using IC motors.
Skip ahead a few minutes to see his amazing death machine in flight.
A flight controller should be able to control IC throttles using servos. Just because it can be done doesn’t mean it’s a good idea.
Agreed. I’ll take my lumps because I didn’t think it could be done. But after watching that my opinion of it hasn’t changed. Especially with a person on board… yikes.
yes, i am experienced in large electrical UAV and studied the captive power plant with IC engine too, IC engines are slow, however where there is a application where refueling or recharging at destination not possible, i need to in for IC engine based concepts.
any specific flight controller you would like to recommend which has has a servo throttle control for hexacopter , i see most of them focus on driving the ESC then an motor. there are controls for servo and they are used for camera shttuer, drop object, drop landing gear. I am looking something ahead of this.
in particular i need to know how i can configure the pixhawk FC outputs ( motor) to drive servo, i mean all the ouput ( motor) to drive servo for throttle positioning ? if yes, how can i do ?
thanks a lot for the reply, I have another query, if i configure the outputs as PWM, would i get the same benefits of a Collective throttle and turning direction algorithms will get implied to Servo ?
I would like to know since use the servo for throttle control as for a hexacopter there would be 6 engines, the 6 throttle controls would be used by this servo, however as an FC, the alogorithm applies to Motor interms of RPM, an different RPM for turning for each motor and same rpm for all motors for collective climb up or down. May please share your experience on this.
IMO you should use closed loop controllers for prop RPM (something that will turn PWM into controlled RPM) not open loop throttle control.
Though I think it would be better to use variable pitch propellers at fixed RPM as it would get you the fastest possible response preferably with mechanically coupled rotors as it will prevent violent attitude loss on loss of the motor also better moment of inertia with engine close to CoM.
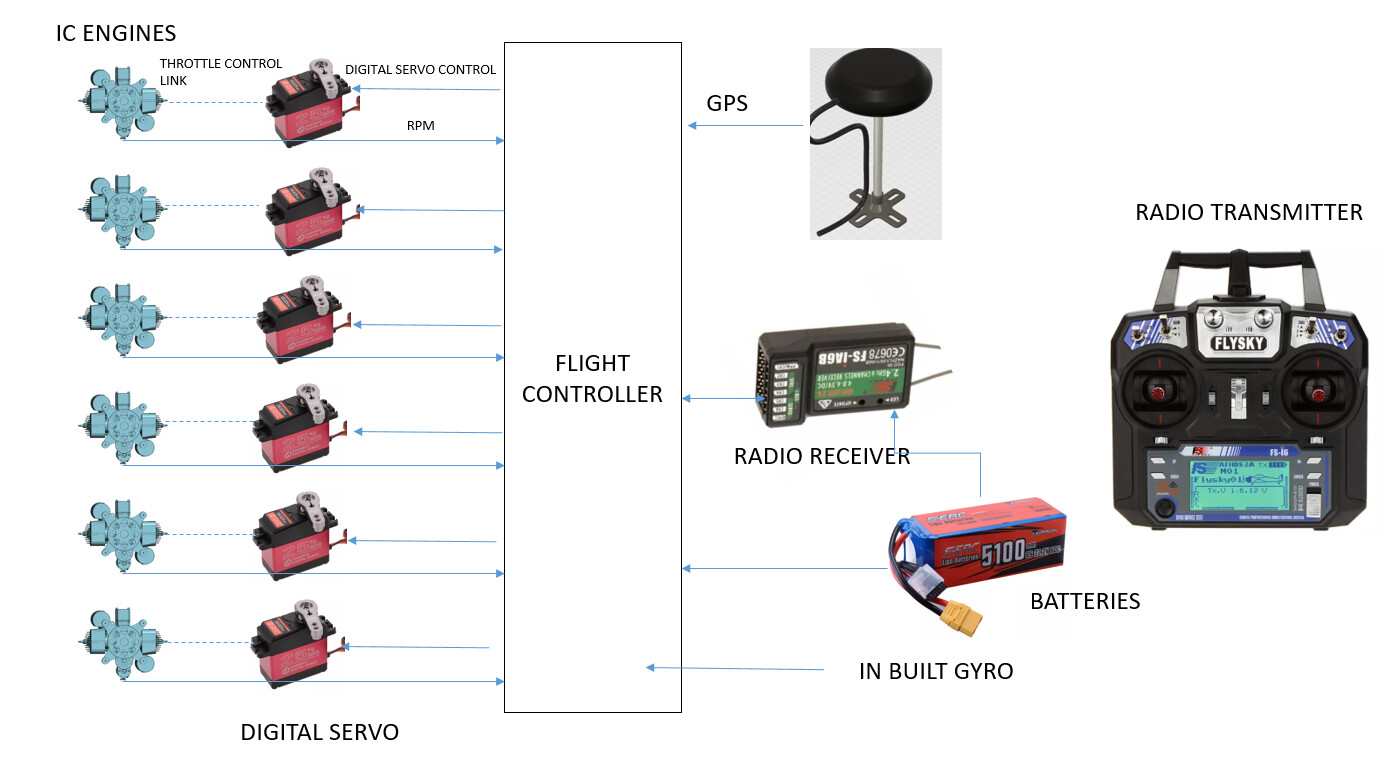
i agree lupus, thanks for the response. Yes, i am pursuing from the start for PLL type of function where the RPM is constantly measured, see attached high level diagram.
Unfortunately as far as I know no board has support for running 6 RPM governors. Trad-heli supports one IIRC. You would need external governors or use one big engine running fixed RPM with variable pitch.