Hi folks. Long time lurker and have learned so much reading all your posts that I haven’t needed to post until tonight.
I have a previously reliable FT Bronco VTOL (2 vectored yaw in front, fixed rear) running a Matek f405 Wing 4.1 stable. This bird has transitioned and flown successfully and beautifully at least 30 times (thanks devs!).
Tonight, I put it in a gentle low hover at home in preparation for some flying tomorrow and without warning it went full throttle on two of the motors, flipped hard and trashed itself. I have the log file and I have honestly stared and squinted at this thing in multiple log viewers for at least two hours and I cannot figure out what could have caused this. To my untrained eye it seems like the FC thought it was experiencing a sharp roll and compensated for it, however, there was no sharp roll… only a gentle hover and drift corrections.
(Also the USB port on this flight controller is broken and the only way I can get in is through a SIK radio so I can’t flash it to 4.2)
Solved. Telemetry radio tx presumably interfering with left ESC due to their wiring running parallel to each other down the length of the wing into the left boom. At a high hover altitude I experienced a few more brief but recoverable WOT glitches on a replacement left ESC and noticed they went away after turning off the telemetry radio tx. 20+ test flights and still no glitching.
I’m haven’t built a VTOL, but enough planes and quads that I’ll suggest one more idea: The right ESC/Motor/Prop was having issues and the FC was backing off the left side to balance the roll.
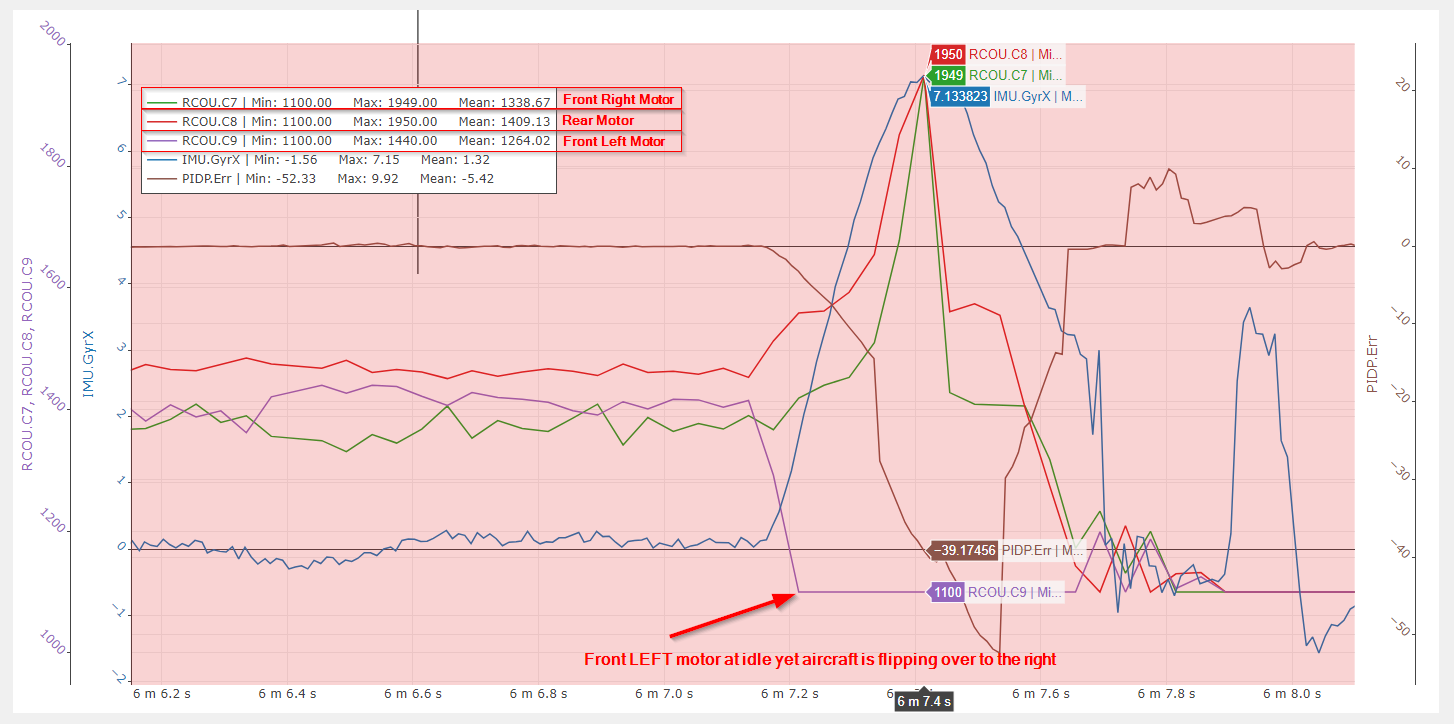
Thanks for your comment, Allister – I had similar initial thoughts as well, but I witnessed that left motor go wide open full throttle despite the autopilot sending 1100 idle to that ESC. The IMU data concurs it was a violent right flip which physically could not have happened if that motor was doing what the FC told it to do (even if the right motor/esc/prop suddenly lost thrust as you suggested).
Not sure if you noticed my previous post but the problem went away after turning off the telemetry radio. I have several aircraft I’m working on at the same time and tonight I realized that a few weeks earlier I had cleaned up the wiring to the servos, sik radio, and esc by zip tying them in a tight looped bundle inside the boom and the wing in pretty close proximity to the sik radio antenna. I’m not 100% sure but I think the doomed test hover flight may have been the first flight after cleaning up the wiring which makes sense that the sik radio could start causing interference with that ESC (as well as the replacement ESC) because I may have inadvertently made a perfect 900mhz “antenna” by looping up the ESC’s excess signal wire.