Hello.
I’m currently flying in auto mode with a target speed of 100 km/h but it is not working.
I checked the flight logs and the behavior is that the aircraft brakes once at over 60 km/h, accelerates again and brakes.
I am comparing it to vibration, but the vibration value is also large and I feel there is some relationship.
We have solved most of the hardware problems, but the engine is the limiting factor.
Can you tell me anything about these?
Here is the log for reference.
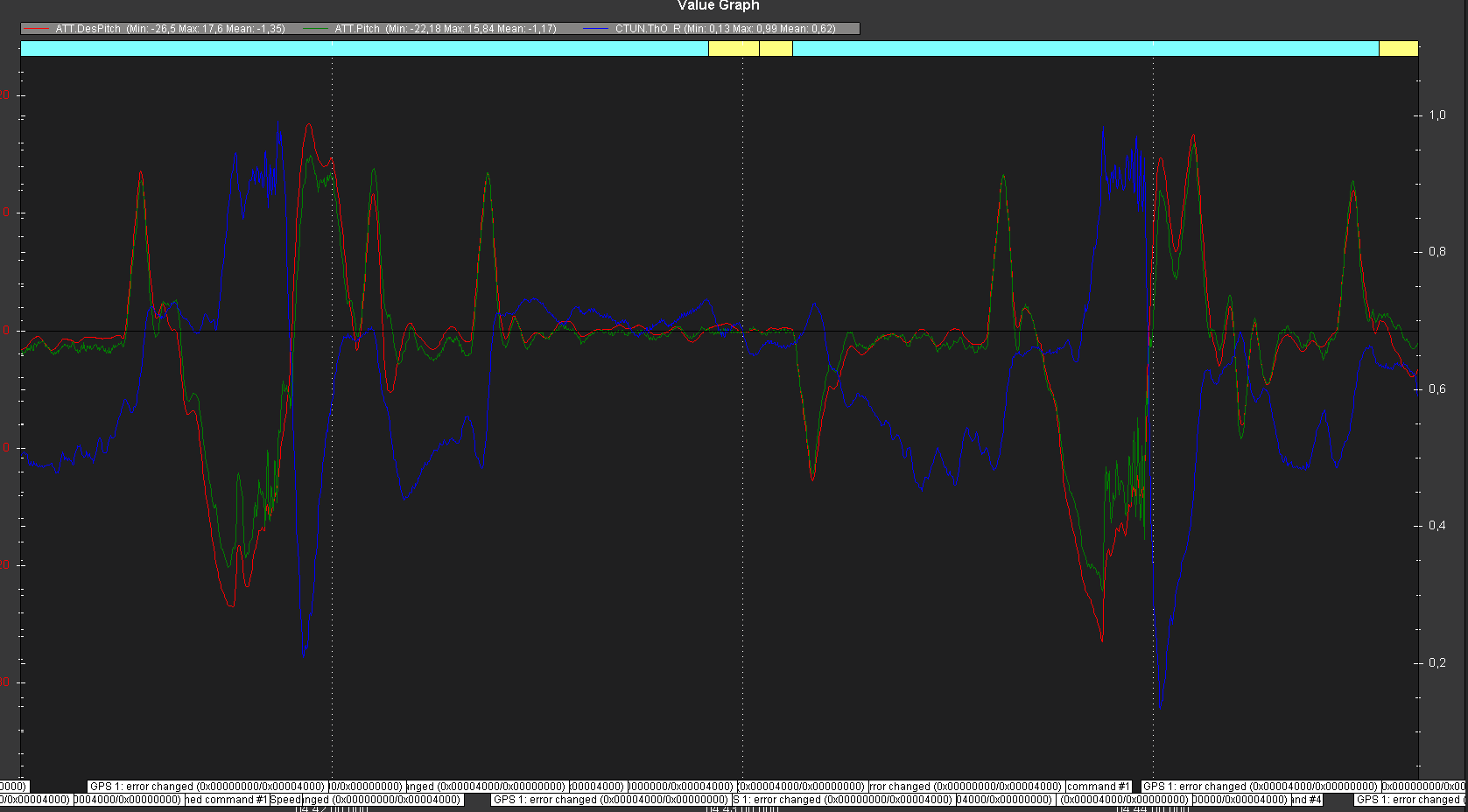
It’s not a vibration. You have an oscillation in the attitude controller. It could be due to the response gain used in autotune to tune the pitch axis. I know that I recommend 1.8 to 2 which can result in some unwanted oscillations but typically those are higher, more like 3-4 hz, where this is 1.5 to 2 hz. If you still have the log, I would like to see your autotune flight for the pitch axis to tune rate P and rate D.
I think the reason you can’t go to higher airspeeds is more so an issue of the max acceleration WPNAV_ACCEL. But I have to check into that more.
Thanks for responding.
Is what you are saying about ATC_RAT_PIT_xxxx correct? I have set there values by default.
If you don’t mind, please let me know how to set it up.
This is the log data at the time of pitch axis to auto-tune rateP and rate D.
As for WPNAV_ACCEL , I used it before and did not notice any change.
How should I adjust these parameters to achieve the target speed, for example?
The file you posted is not the flight that tuned rate P and Rate D for the pitch axis. This file was the one that tuned the FF gains for pitch and roll. Please post the one for tuning the rate P and D for the pitch axis.
I went back and checked the many logs and found that Autotune rate P and D were not successful.
You were talking about AUTOTUNE_GN_MAX?
If I adjust this value, will Autotune succeed?
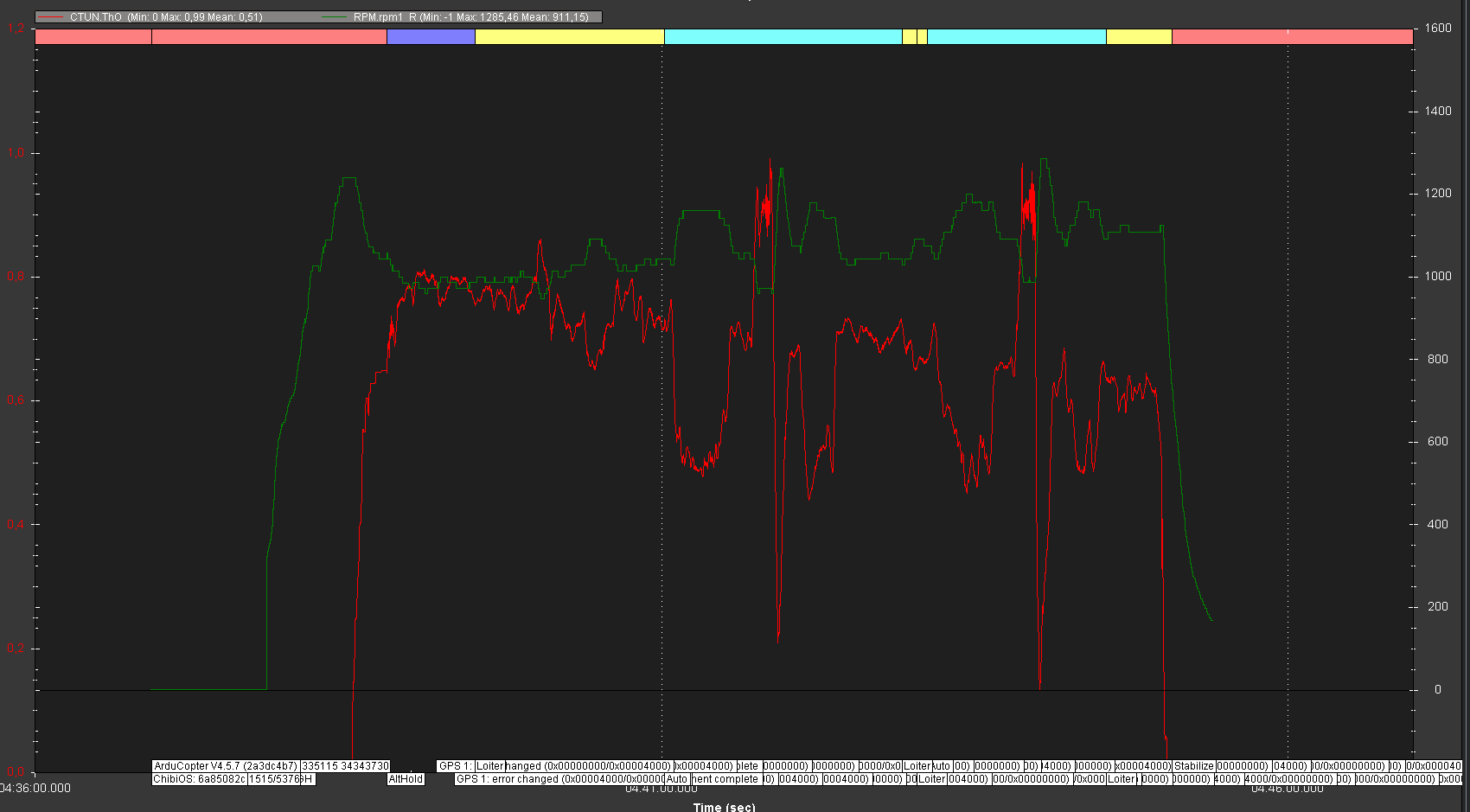
The main problem here is you’re maxing out the thrust vector: collective is maxing out, not much left to provide both lift and thrust in forward direction.
Consider the fact that operating low RPM (with the additional worsening factor of rpm drop) and having such an high angle of attack on the rotor blade might put the system closer to aerodynamic linearity limits- controllers will have hard time coping with this mix of factors.
Which size is this rotor?
Getting better rotor blades with higher maximum coefficient of lift. It may be quiet hard as manufacturers tend not to share performance data.
Increasing headspeed. It will let the rotor produce more lift. Do NOT go over manufacturer recommend maximum headspeed or your helicopter may spectacularly try to kill everybody in a vicinity.
Hi, first, set up correctly the throttle management. Is this a gas heli? you have set passthrough on CH8 and H_RSC_MODE to 1. Both this actions are not safe.
I advice to set it up to H_RSC_MODE 3 and tune the throttle curve, then switch to H_RSC_MODE 4 and tune the governor.
As @LupusTheCanine mentioned aim for an headspeed that your rotor head can safely withstand.
Then , re-run the rate tuning process for your selected headspeed.
The type of rotor was chosen to be larger, which resulted in a larger load and a greater up and down rotation.
This discussion will be of great help to us in the future.
Thanks for your input.