Regarding the setting of FS_GCS_ENABL, I am currently using the ground3.8.5 ground test and there is no actual flight. After I disconnected the ground station, the autopilot did not enter the RTL. At this time, my remote control did not lose control. FS_LONG_ACTN==0, FS_SHORT_ACTN==0, why? Thank you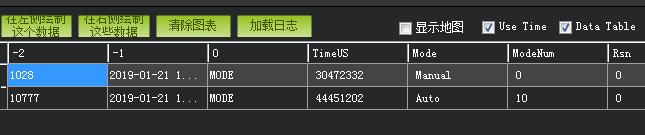 00000002.BIN (936 KB)
00000002.BIN (936 KB)
000002.BIN is my log, I am running APM on the Raspberry Pi
FS_GCS_ENABL I set 1
I’m looking at your log. As you said, you set FS_SHORT_ACTN and FS_LONG_ACTN to 0. Thus, when the GCS Failsafe occurs (t = 56.9 sec) the mode does not change from 10 (AUTO).
Did you expect something different to happen?
Perhaps it might help to read the detailed info about the FS_ parameters? http://ardupilot.org/plane/docs/parameters.html?highlight=failsafe#fs-short-actn-short-failsafe-action
Yes, I want to enter RTL mode after GCS failsafe occurs, but the remote control RC failsafe cannot enter RTL mode, because my RC control distance is only 1km, but my ground station radio can keep 20km communication with the ground station, so I want to realize that the RC remote control is out of control and does not return. The GCS loses control and enters the RTL mode function, but it does not actually complete this function. Because once I set the FS_SHORT_ACTN or FS_LONG_ACTN function, my RC remote control will go into RTL mode after running out of control, and I can’t continue the auto task. All of the above are in the auto mode.
I think that 1km is well beyond your ability to safely control the aircraft if something goes wrong. Flying remote aircraft in unsafe conditions is a serious and problematic thing to do. I am opposed to flying in any manner which seems unsafe in this regard.
For that reason, I’m not interested in continuing this discussion any further. I hope that you understand my concern, and re-consider your objectives.