Hello.
How can I keep RTK-Fix on a MovingBase ROVER that uses two ZED-F9Ps?
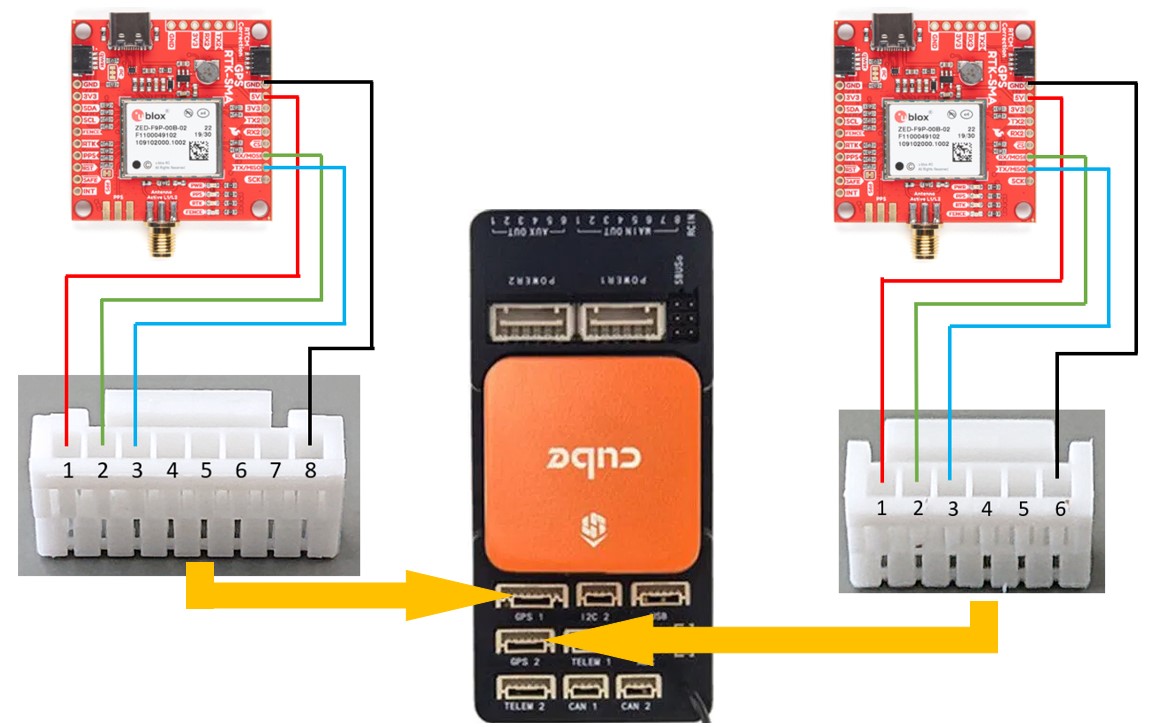
I installed the Rover-4.1.0beta firmware on my Pixhawk CUBE Orange and set up MovingBase using the documentation here as a reference.
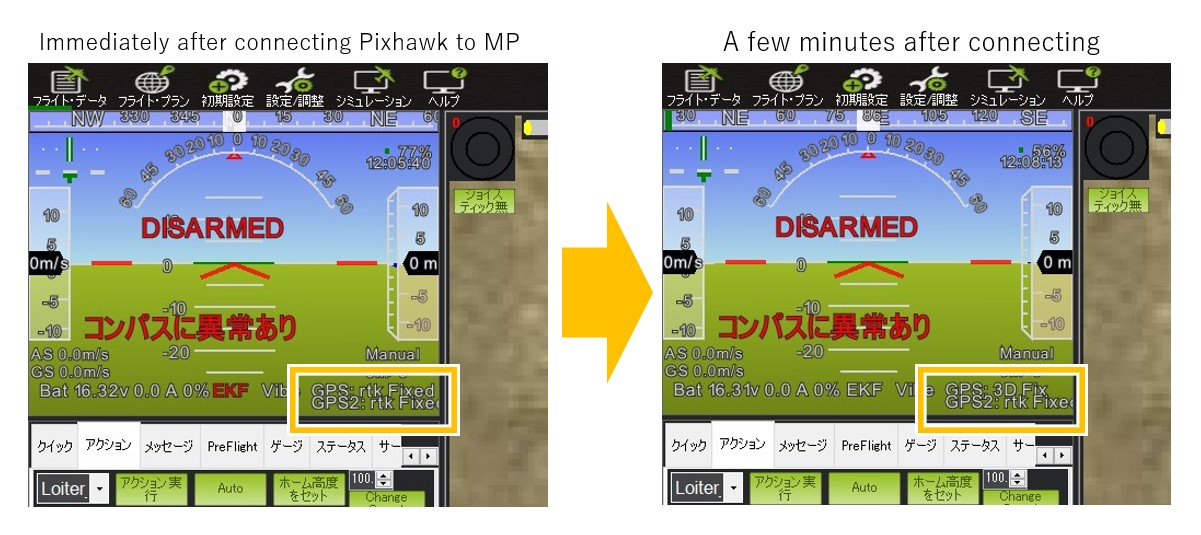
This ROVER can estimate its orientation with high accuracy, but for some reason it does not become RTK-Fix.
To be precise, for a few seconds after connecting Rover and MissionPlanner, ROVER will be in RTK-Fix. However, after that, ROVER will remain in 3D-Fix for the rest of the time.
I used u-center to install the latest firmware on the ZED-F9P and configured it as a mobile station.
Then I used NTRIP to communicate with the RTK-GNSS reference station.
When I connected the same ZED-F9P to another ROVER without the MovingBase setting, that other ROVER keep RTK-Fix.
I set up two RTK-GNSS antennas at least 30 cm apart from each other on my ROVER, and also set up a ground plane.

Is there a parameter to keep RTK-Fix that I’m missing?