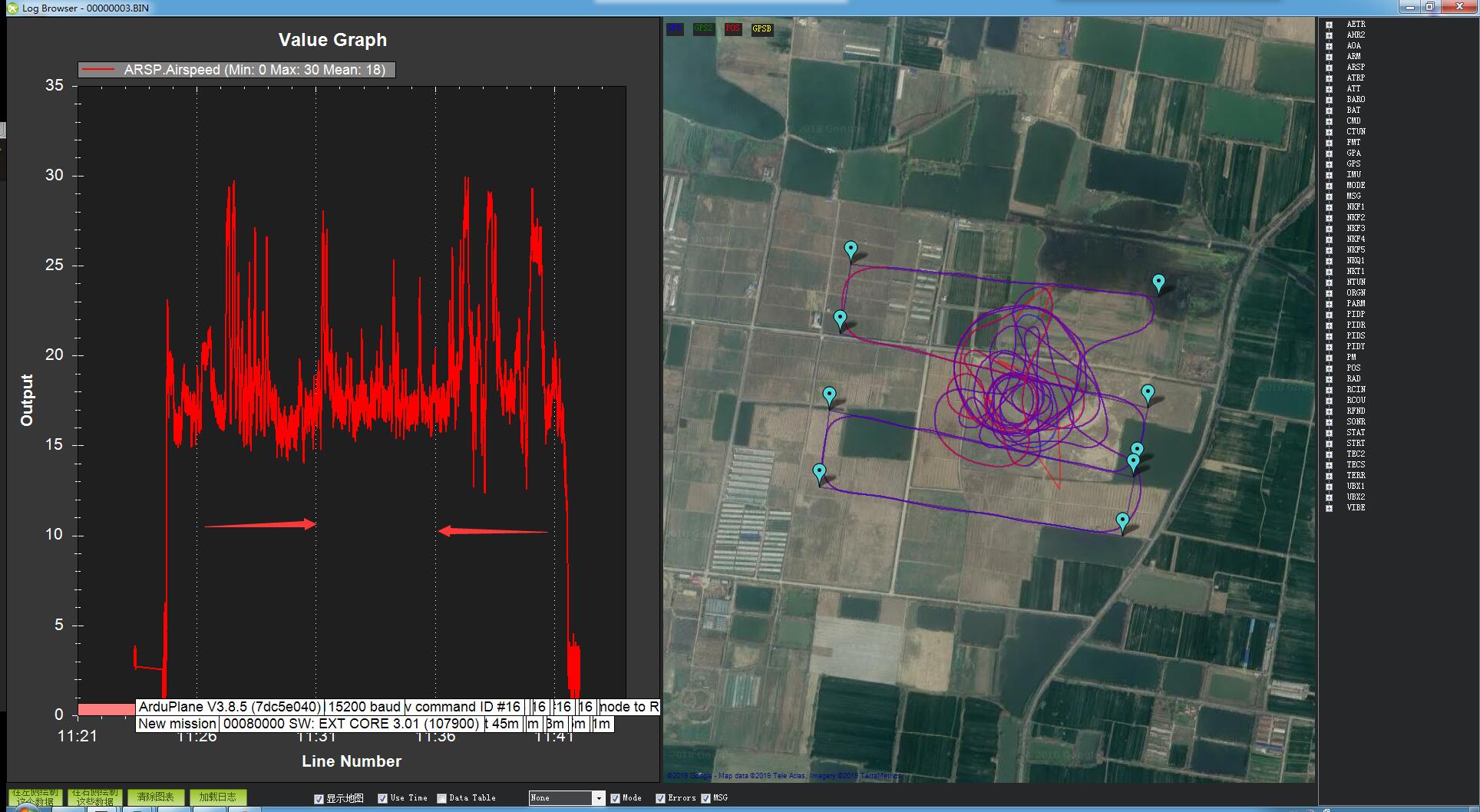
Ok, the airspeed meter is not enabled by default. I forgot to set up the airspeed meter. What is the reason for setting the airspeed meter not to be enabled by default?
I will fly again, thank you.
the default is to log an display airspeed but not use it. This is because the first flight with an airspeed sensor it is uncalibrated and may be badly incorrect. After you calibrate it then you can enable its use
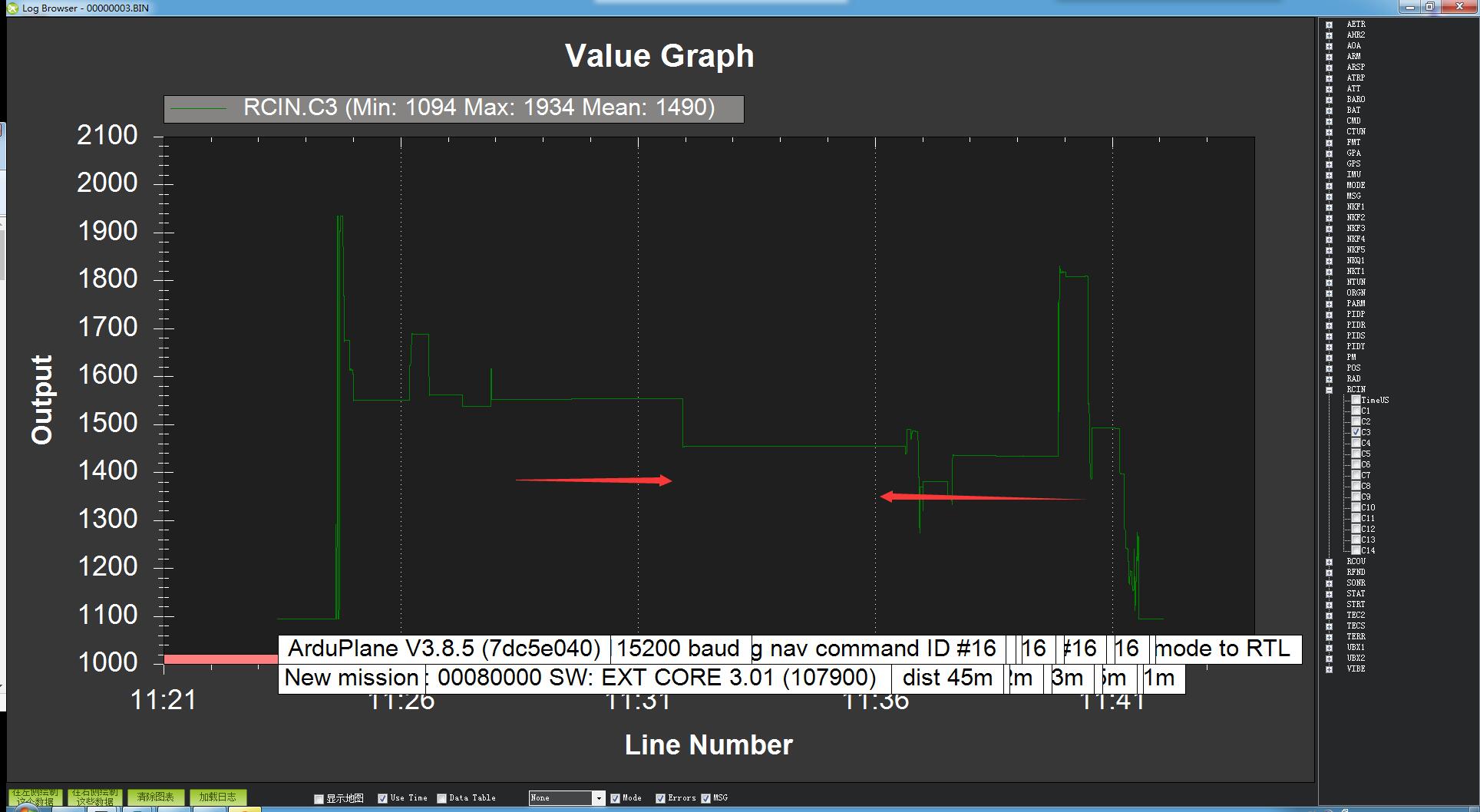
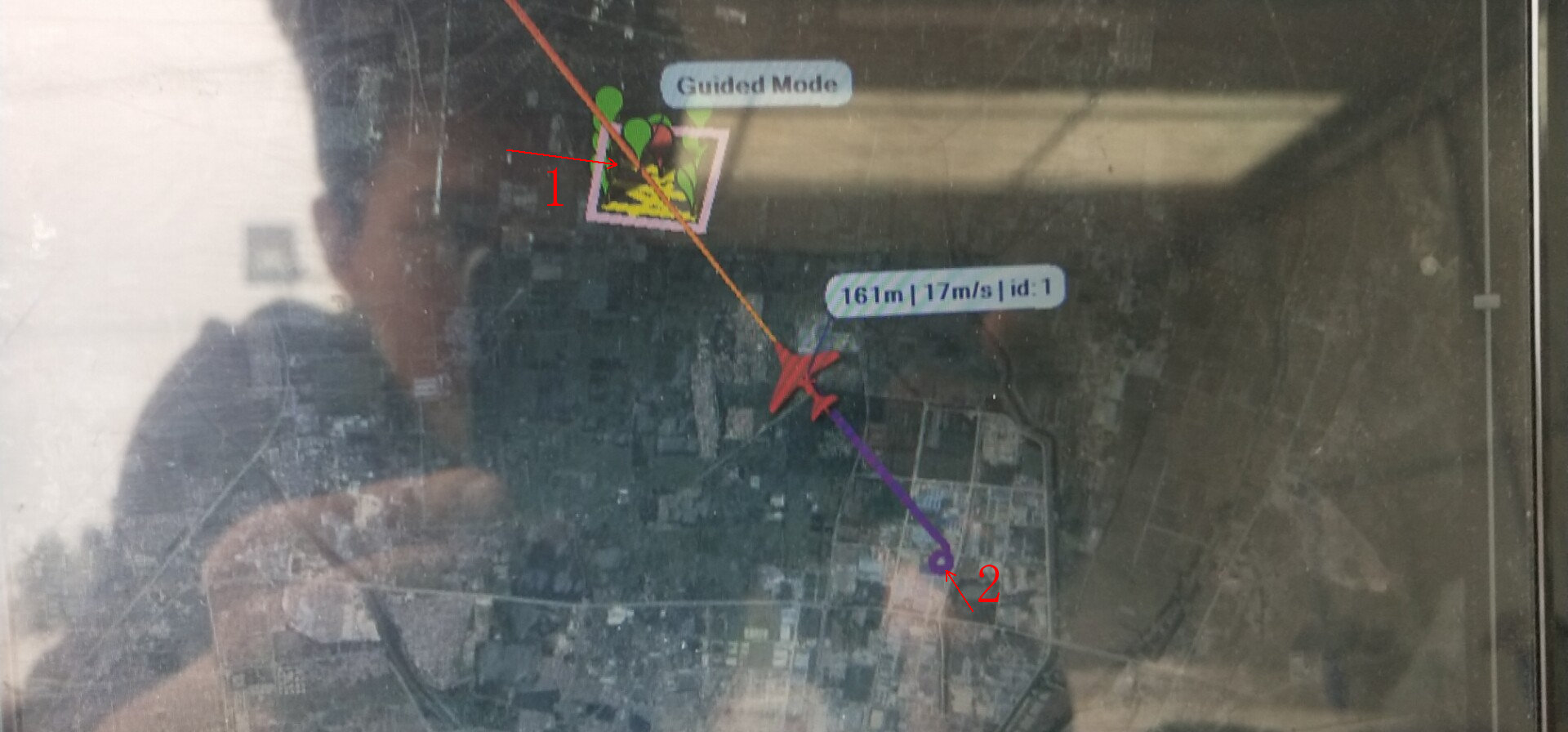
1 point is home, I use Guided mode to try to fly a little farther, this process RC remote control is failsafe, but the aircraft does not have RTL but continues to fly to my designated waypoint, this Why?
There is also the fact that I can’t set the RTL mode through the ground station after hovering at 2 waypoints. Even I can’t use the ground station to switch to any other mode. I am a little scared. Fortunately, the ground station is not out of control. I continue to use Guided mode to point to the home. Nearby, I regained control of the aircraft. There is no RTL after the RC is out of control, and I can’t switch modes. Why?The log file is too large for me to upload. .
Try to compress the log file to several files and upload it tomorrow.Thank you:grinning: