Good afternoon everyone,
Today we tried a scenario where we switched from VIO-yaw/Optical-flow-position to VIO-yaw/GPS-position. It works pretty good, the only notable thing was a small jump in position which can be noticed during flight by a very short aggressive response of the position control. It does not look like a big deal honestly though it looks like it is produced because the reset of the position does not coincide with the reset of the target position. Below a plot of how the position in X jumps and the target position as well, but they do not jump to the same point:
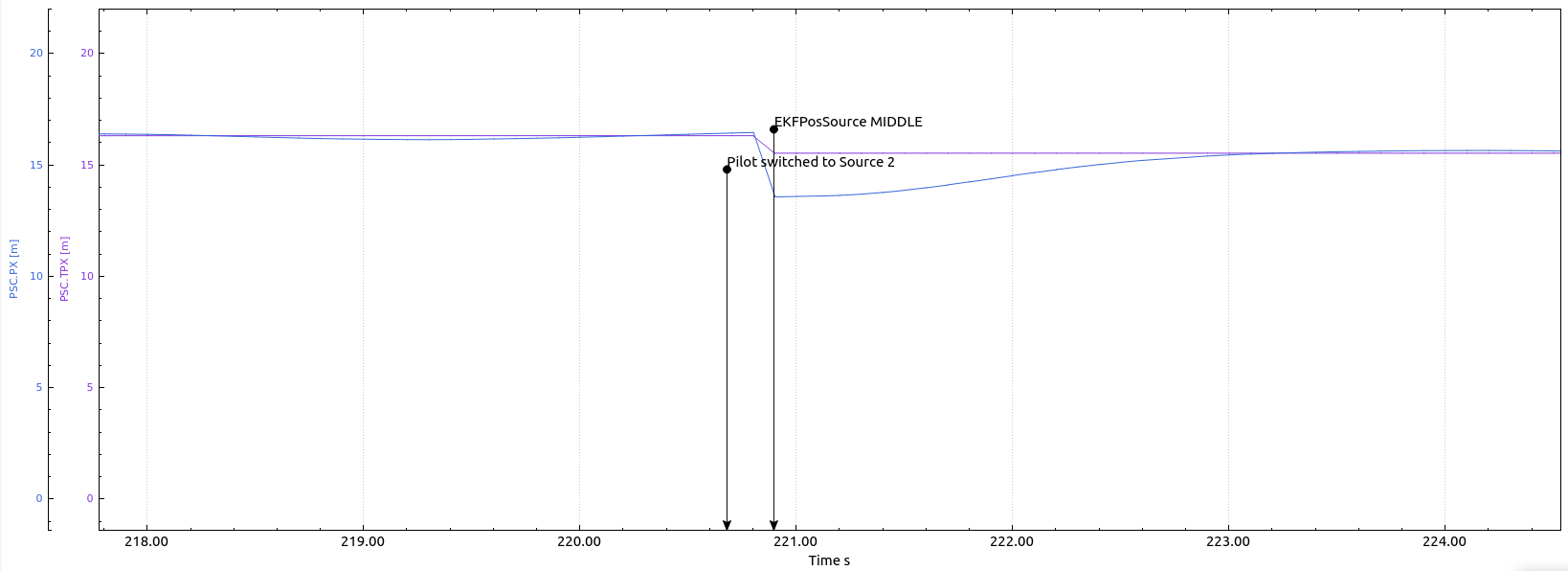
It really does not seem such a big deal, and we daresay the optical flow loiter mode and the transitions were in general great. I just wonder if there is a reason for the TPX and PX not being reset to exactly the same value for smoothing the transition, or if we are configuring something wrong. Thank you again for this great software, please find the log below: