I’ve been struggling to find the best LOG_BITMASK settings to perform iterative ACRO tuning on a 7 inch quad.
I’ve followed the AC docs and some AC tuning guide videos and posts to successfully make it through initial HNTCH setup and successful completion of several rounds of AUTOTUNE, but now I want to focus solely on manually refining my ACRO mode PID tune while still being able to monitor the vibration data on the quad so that I can examine it in the Filter Review webtool and keep tabs on my filtering effectiveness (refining along the way as I crank up PIDs in ACRO).
The problem I’m having right now is that:
- With my current configuration, I appear to be dropping lots (>1M in a flight) of messages and this appears to be corrupting the data to the point where Filter Review tool won’t even open the file
- I’m not certain which messages I really should be logging to achieve my goals based on my FW/HW combination
My quad’s configuration is as follows:
7" frame running 6S
Kakute H7 V1.3 FC
AC V4.5.2
SCHD_LOOP_RATE 800hz
Logging to microSD card: Samsung Evo Plus 32GB (rated “U3”)
Log bitmask 180221
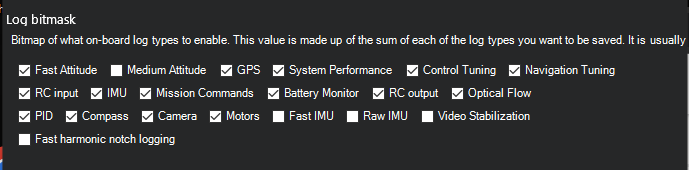
If someone can sanity check my rationale I’d appreciate it:
-Fast Attitude: need this for manual PID tuning
-Medium Attitude: not needed/superseded by Fast Attitude
-GPS: I would like to keep this on if possible - I think it’s low overhead
-System Performance: ditto
-CTUN: ditto
-NTUN: ditto
-RC input: need this for PID tuning
-Compass: I would like to keep this on if possible - I think it’s low overhead
-Camera: N/A for me
-Motors: need this for PID tuning
-Mission Commands: I would like to keep this on if possible - I think it’s low overhead
-Optical Flow: ditto
-PID - need this for pid tuning
-Video Stabilization - don’t need
The ones that I’m struggling with are:
-Fast Harmonic Notch Logging - I’m not exactly sure what this is used for - sounds like I need it for HNTCH tuning but I don’t recall seeing any of the docs/guides recommending it being enabled.
-IMU vs Fast IMU vs Raw IMU - this is where I get a little confused, I just want to be able to monitor vibrations with enough precision to perform HNTCH and other filter tuning/refinement. I think I need Raw IMU for the Filter Review Tool but do I also need Fast IMU to generate relevant PID tuning plots? I’m guessing regular IMU is redundant at that point.
Couple related questions:
It sounds like in-flight FFTs deprecated at this point, is there any point turning that on for my use case?
IMU batch sampler sounds like it is deprecated at this point? (i.e. INS_LOG_BAT stuff should all be disabled?)
Any guidance is appreciated!