Hi ![]() ,
,
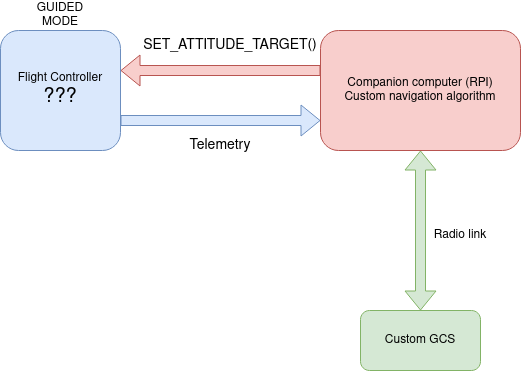
i would like to ask you for flight controller recommendations which would work in scenario shown on diagram below. I would like to exchange commands between fc and companion computer via Mavlink protocol (physically on UART) and use SET_ATTITUDE_TARGET command in GUIDED mode for quadcopter control with custom navigation algorithm implemented on RPI.
I’ve tested this setup on Mamba f405 MK2 and communication between RPI and FC worked fine, but despite the fact that the FC is supported by Ardupilot it seems to be susceptible to massive EKF3 drift (ground speed and attitude). The drift makes it impossible to use the Mamba FC in mentioned scenario. ![]()
Therefore I would like to ask you for FC recommendation which has been proven to work with Ardupilot in similar scenario. FC with 30.5x30.5 mm mounting holes would be perfect for my setup. Pixhawk is not an option as it’s not available in my country ATM.
I’ve thought about Speedy Bee F4 V3, which seems to be functional, cheap and available. Does anyone have experience with this board? ![]()