Please, if someone could help me with my first Ardupilot project.
Goals
I have 3 goals with this project, in 3 phases:
Build a Multirotor that can be used with Mission Planner or APM Planner 2 in Linux, for small missions;
Use FPV and record it;
Use Python to build missions.
Context:
After some years playing with multirotors, and building one with DJI Naza, I would like to learn how to build a multirotor with ArduPilot APM.
I have some hardware from other projects:
F450 Frame
4 DJI 20A ESCs (E420)
4 DJI E305 motors
Turnigy 9xr Pro controller with FrSKY 2.4Ghz
FrSKY D8R-XP 2.4Ghz
3DR GPS+Compass
FPV 433Mhz Radio Telemetry (Only Ground Module)
Battery buzzer
Naza OSD N1
Finally, what I have available for buying is Ardupilot APM 2.8, but I am not sure if it would work for my 3 goals. Also, I don’t know if I can use all the hardware that I mentioned.
Do anything to avoid buying a APM flight controller. It’s very old and no longer supported, so you wont get much help.
There are many supported flight controllers, some are quite cheap and easily available.
If you’re willing to spend $100 US, there’s really no need to buy clone hardware. Matek, Holybro, and QioTek all have autopilots near that price range, to name just a few.
Regarding, my 3 goals, do you think that is feasible to reach with maybe: Holybro Pixhawk 6C, or do you have a cheaper option that I could use to achieve:
Build a Multirotor that can be used with Mission Planner or APM Planner 2 in Linux, for small missions;
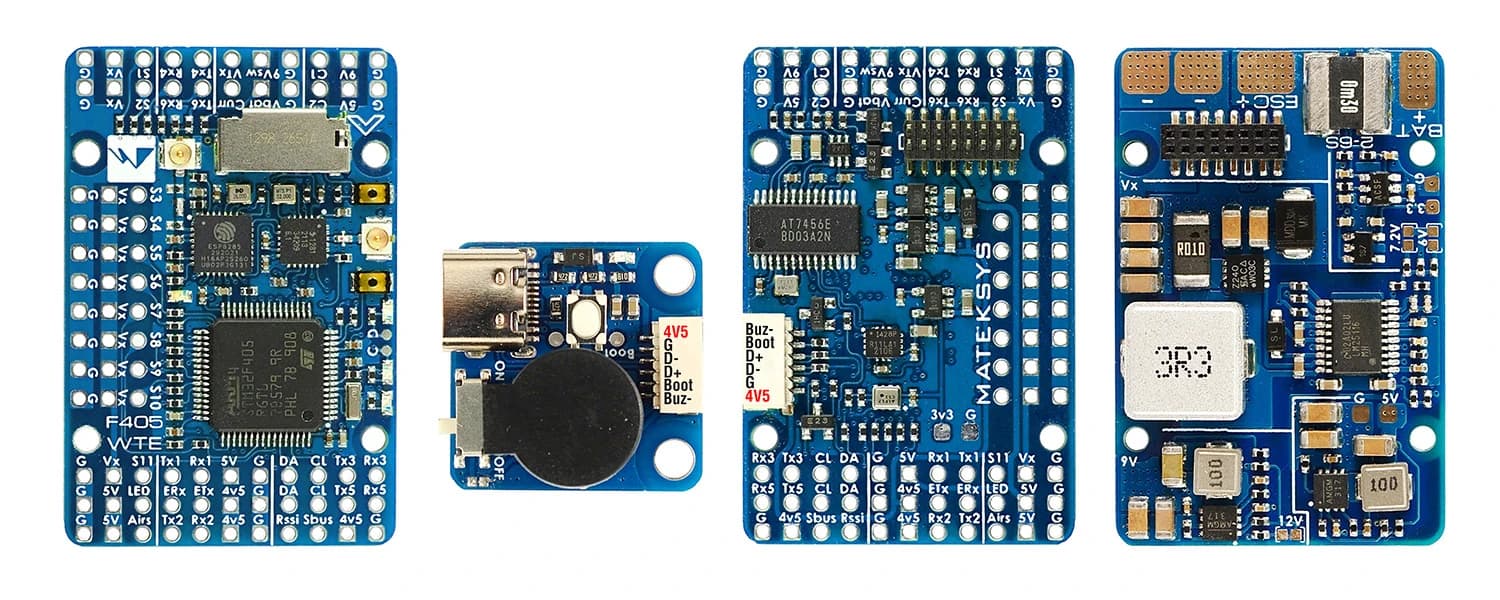
Sure that Flight Controller will work fine as will many others both cheaper and more expensive. Your requirements are light. HolyBro and Matek also make FC’s that will work in the $70-$120 price range. You mention FPV. Most FPV flyers use OSD. The 6C does not have integrated OSD, that would have to be done with an external board. The cheaper board options do have it integrated.
I don’t recommend F4 boards for any application anymore but you do get a lot of bang for the buck with that board and it might perfectly suit your purpose. But the ELRS Rx won’t do you any good if you have Frsky RC stuff. You could flash the radio for WiFi telemetry which is useful for very short range purposes (configuration, calibration, tuning). But, you can still use your Frsky Rx with it if you want. Other options are; Matek H743-WLITE, Matek-H743-Slim and the HolyBro H7-Mini (no Sdcard for logging, lua scripts).
I should have just suggested the Holybro H7, you probably don’t want the mini version. Matek has a mini version of the H743 also and while I like it it’s very small and challenging if you don’t have excellent solder skills!
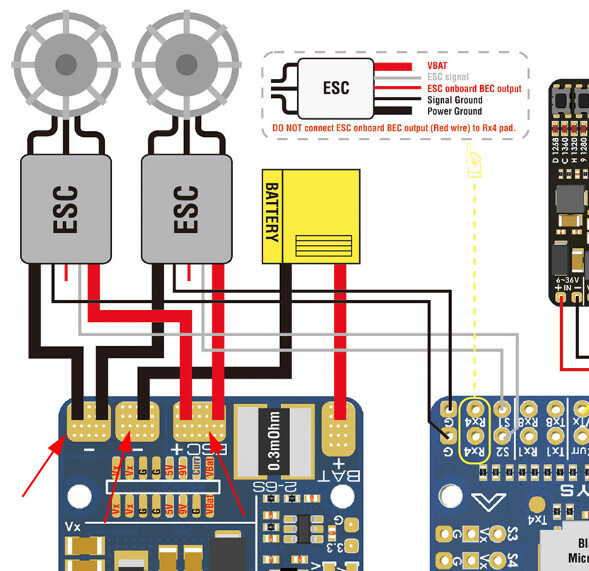
I am almost deciding to buy H743-WLITE, however I did not understand if I can solder 4 ESCs in this board. The only wiring example that I found has just 2 ESCs and 2 motors. Do you know if is fine to put 4 ESCs on this board?
for the positive and negative on the image on the left you can solder as many as you’d like as that just provides power direct from the batteries. Since you are using a 4-1 esc just solder the positive to the one that says esc+ and use whatever negative- you’d like. This flight controller allows more than just 2 esc connections. It actually provides 12 areas to connect ESC or servos to using the S1-S12. you just need to set the corresponding SERVOn_FUNCTION to what you have connected to it. if you are using it on a quad copter you’d set the servo functions to be motors 1-4. https://ardupilot.org/copter/docs/common-rcoutput-mapping.html
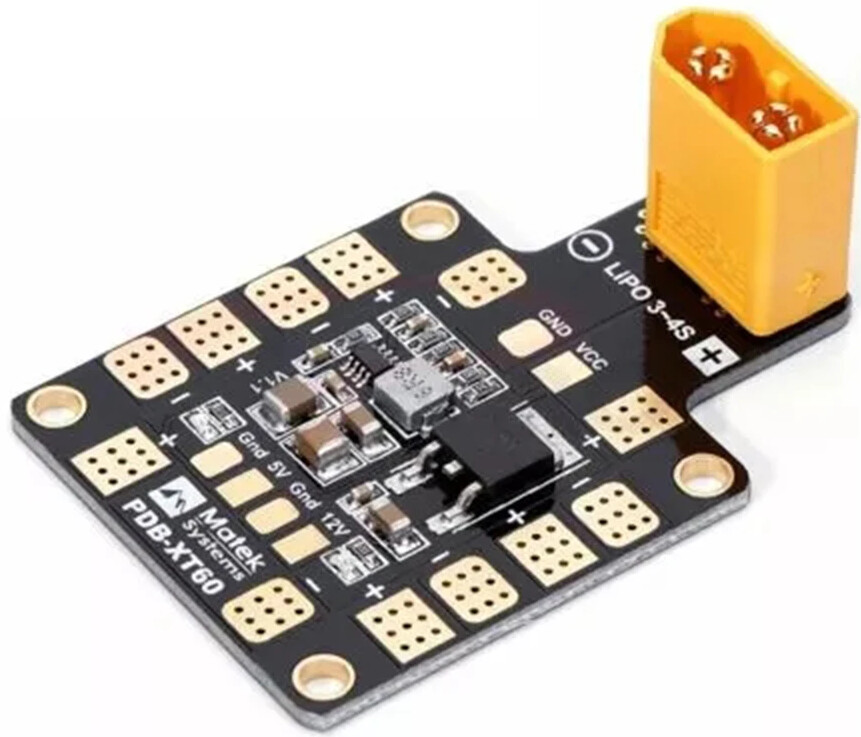
You are good with that board. Some are configured for convenience for Planes or Vtols but they will work for any type craft. And you get a PDB with a current sensor.