First off, I am using QGC to set up parameters, calibrate, and for communication.
I have a BBBlue (Linux AutoPilot). I set up my cross-compilation and then ported it to the Linux target, paired the receiver/transmitter, calibrated the ESCs and other onboard components, and then everything seemed to work. Except for one thing, the Linux target (BBBlue) is not communicating to the ESCs once calibrated.
…
So, let me try to explain in case anyone that wants to answer is not aware of the build for the configure --board=blue.
As far as I know, the board used RPROC PRU source as an input to the board from the SBus receiver (FrSky). Then, that PRU source controls info. to the ARMv7l, am335x onboard the BBBlue.
…
Anyway, as you can tell, I am not 100% sure how this is actually being ported to the BBBlue. I keep hearing success stories but lack of success means failure.
I keep learning. This is a good thing but is there specific requirements on the QGC software that I need to know or change to handle the BBBlue build of ArduPilot/ArduCopter?
Seth
P.S. Here are some photos of my current state on the machines.
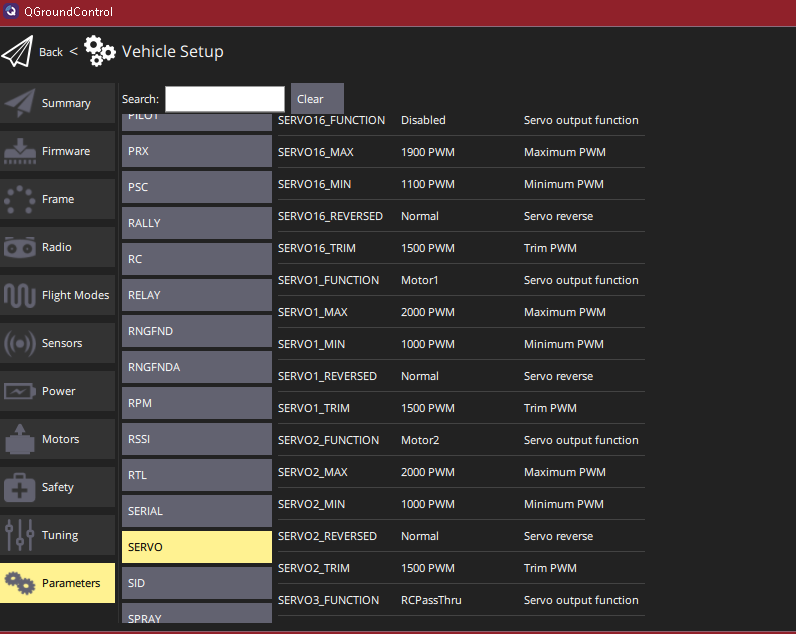
I change the Servo Output in QGC to whatever available options they have currently but nothing seems to be working for the signal and gnd communication.
So, the ESCs are attached to the Servo Headers on the BBBlue. I changed options in the Servo section to handle different ideas in QGC. I am not getting any response on the motors yet.
Does anyone know of the BBBlue and how to handle Servo Options here?
Seth
P.S. I will keep trying, i.e. as this is a nice project I am trying to accomplish.
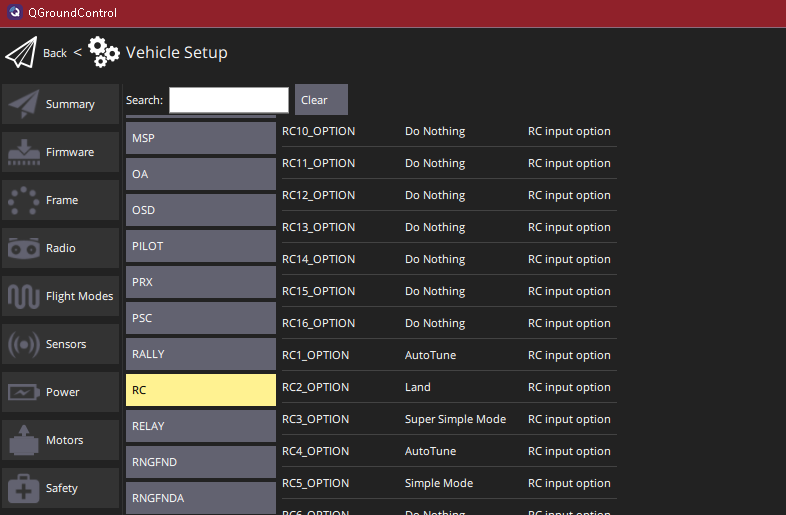
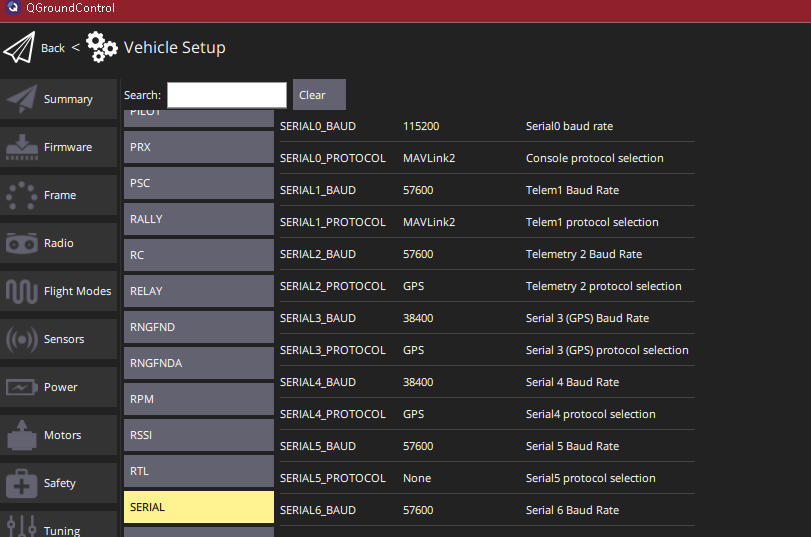
For starters you have SIX RC channels assigned to nothing more than flight mode switching, which is not only a bad idea, but probably unworkable. You’ve also got THREE serial ports configured for GPS - do you really have three GPS modules?
You really need to read the documentation. I cannot stress that enough. Your problems with the software build and now with configuration could have and can now be solved through your own process of discovery. Your present problems have very little to do with the fact that you are using a Linux board.
Fair enough. I will go to the link provided and research why things were installed this way outside of my own set up of config. results from the research.
Also…I will keep on. Please forgive me. initial-setup.html here I come!
Seth
P.S. Oh and you are most likely correct about the Linux Machine not being the issue. Although new to flying w/ a Linux Machine, I am far more inexperienced in autopilot software. So, off to the research. Thank you for pointing me in the correct direction.
I have one GPS and one connection to MavLink. Also, I will be working on this project tonight again. I have read over some of the config. options that are available, I have seen the configs. in the QGC source, and I will be attempting to get the TX and QGC source in cahoots this time, i.e. w/ the Transmitter arguments and QGC arguments/options.
P.S. And yes, you are right. I have been trying for a long time. What are some of the newer boards you guys have adapted to work w/ the ArduPilot source? I saw a STM board someone chose to handle ArduPilot autopilots.