Hello everyone,
A couple weeks ago we had a crash while using the GPS for yaw. Please find the log below:
What happened was that the yaw was drifting at the moment we armed the drone and the innovation was very high (about 23 degrees at 514sec) as shown in Figure 1.
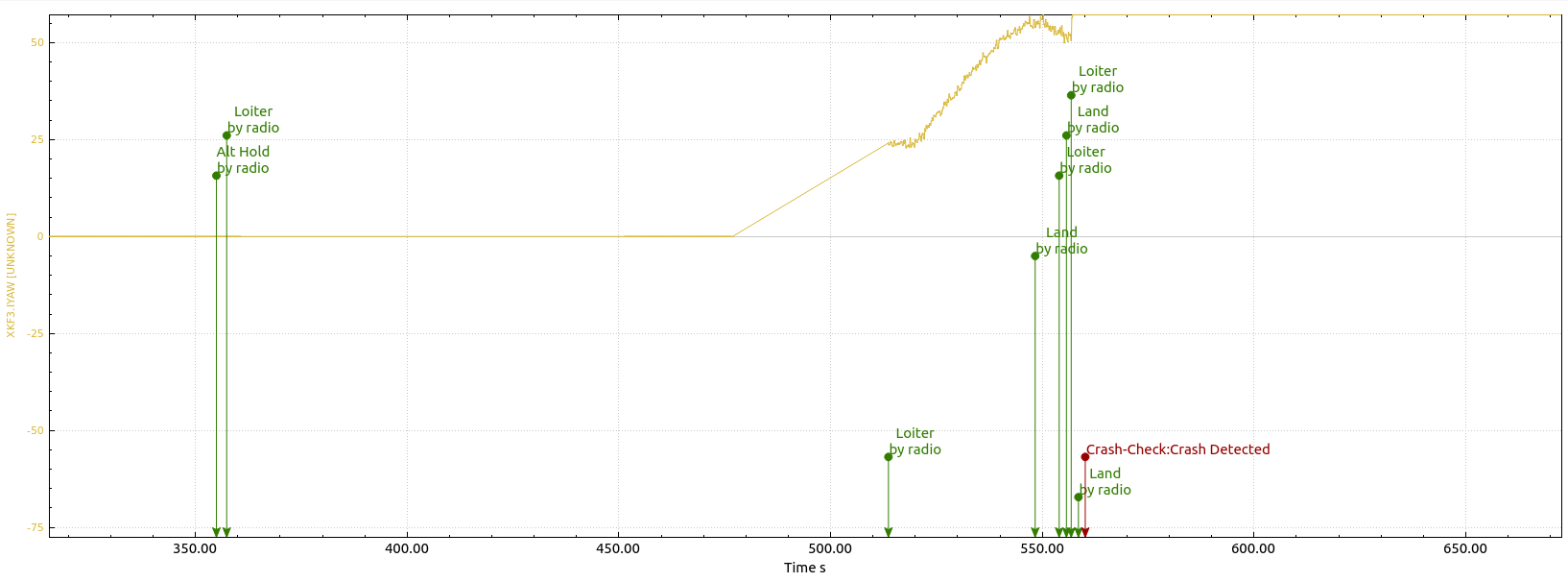
Figure1. Yaw innovation
Since it had RTK fixed, it let us arm the drone and we never lost RTK after arming as it can be seen in Figure 2 where GPS.stauts is always 6 during the flight.
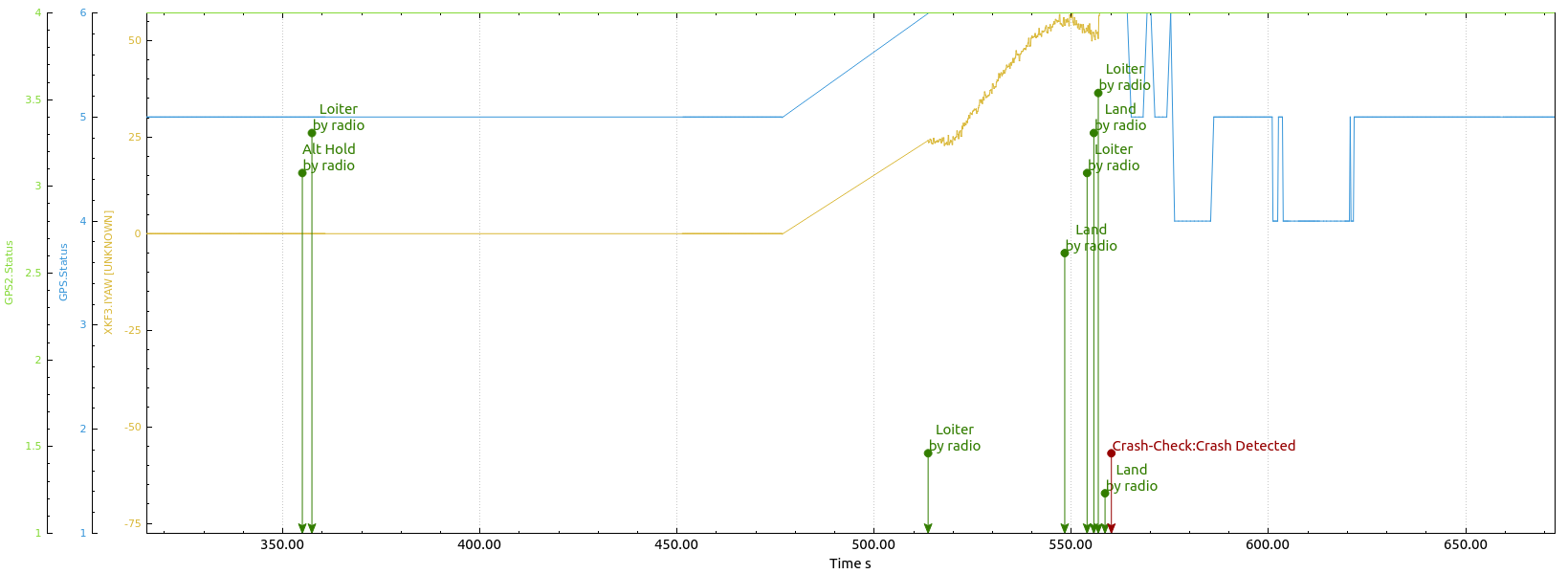
Figure2. GPS status
Trying to replicate the issue, we performed the following ground test. We started to log from boot, then we let the two GPS to warm up until we got RTK fixed. Then we covered them for making the system to lose RTK. We waited until the yaw started to drift, so we removed the covers. The system regained RTK fixed, but the yaw was not immediately re-aligned. Indeed, it took about 30 seconds to converge (221 to 251 sec) as it can be seen in the Figure 3.
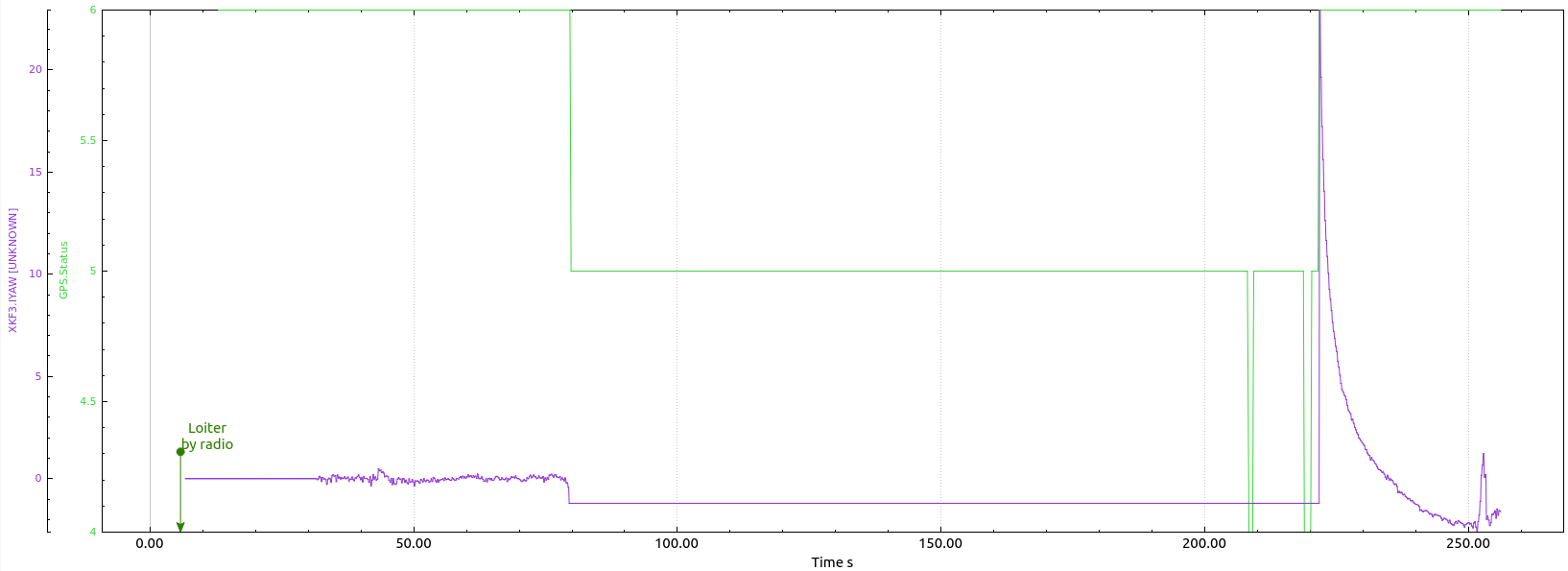
Figure3. Innovation of yaw after regaining RTK in a ground test
The log of that ground test can be found below:
We concluded that if we lose and regain RTK fixed, it is going to take some time for the realignment to happen since it is the Kalman filter itself the one that will eventually decrease the variance and the innovation. Thus, when we arm the drone immediately after regaining RTK fixed the heading is not going to be good for loiter mode. I am trying to understand why the re-alignment did not happen as a reset after regaining RTK fixed. What concern us is that we were able to arm with a heading drifting, so now we are double-checking in the ground station before arming.