Hello Everyone,
We are using dodeca configuration for our logistics drone since we use 12 motors as per the configuration given by ardupilot with the 1.3.74 version of the mission planner.
8 Motors in Main PWM Out
4 Motors in Aux PWM out
During flying, we want to check the RC1-RC12 out on the tuning window but it’s showing up to RC8 pwm values correctly remaining shows ZERO
Please find the attachment for your reference & Waiting for your response @Michael_Oborne @xfacta @Eosbandi
Upload a .bin log to a filesharing service and provide a link to that file.
In Messages to you see something like: RCOut: PWM:1-14
Can you try an updated version of MP?
hello, @xfacta thanks for yours response
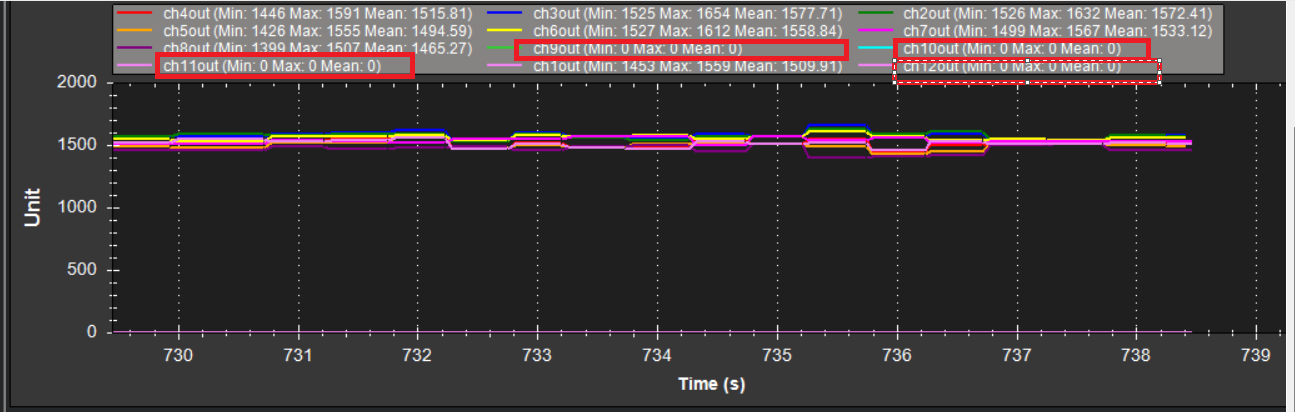
please check the attached image of log analysis ,its showing C1-C12 PWM values.
but its not showing mission planner window.
Do you mean it’s not showing in the telemetry/tuning window?

That is likely a problem with the Mavlink protocol that is not critical, nor very high on the priority list to fix.
Do you have Mavlink2 enabled? For example SERIAL1_PROTOCOL,2
1 Like
Yes, Correct telemetry/tunning window only.
no i was enabled mavlink 1
Mavlink 2 enables many more features.
If you upgrade to latest stable firmware it will update any Mavlink1 interfaces to Mavlink2 - something to look out for if you need mavlink1 for some specific (but very archaic) reason. There are so many more good reasons to update that mavlink1/mavlink2, and having to possibly set it back to 1 manually, is a non-issue.
2 Likes
to get channels above 8, you must use mavlink 2
1 Like
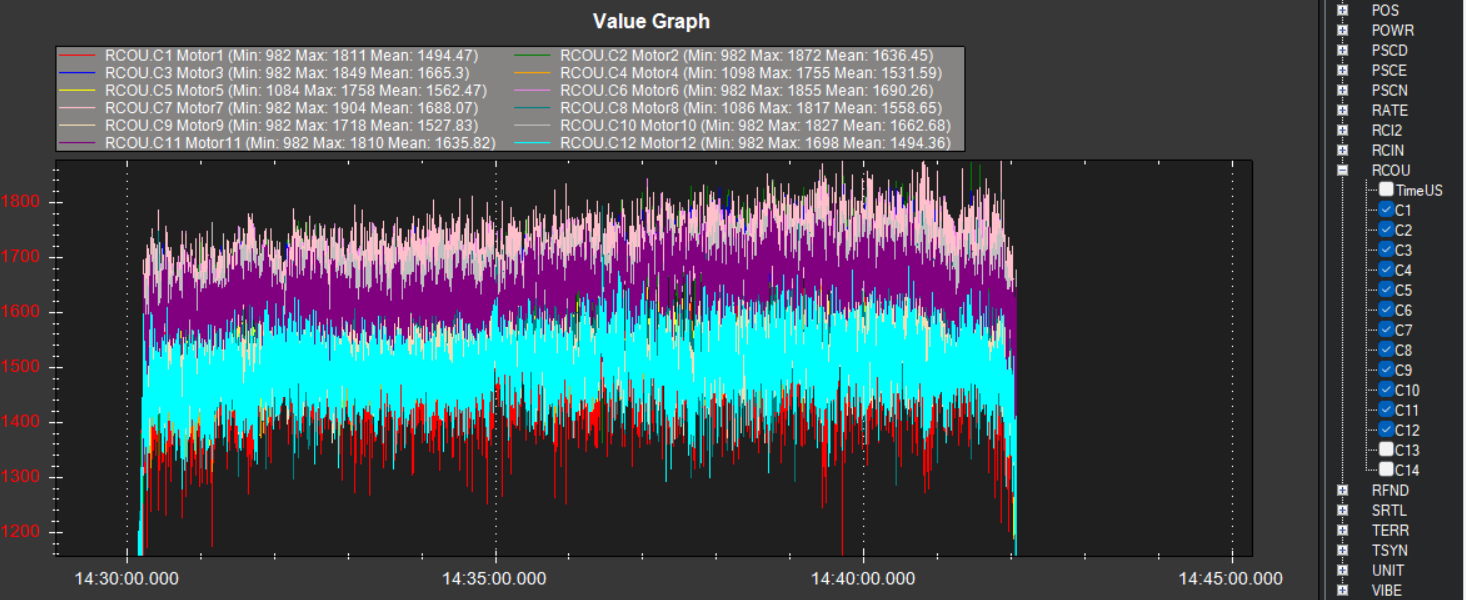
It looks like a lot of motor output oscillation. I would prioritize that.
Please help us with your suggestion to improve this out oscillation @dkemxr
Thank you @Michael_Oborne & @xfacta , Now its working with Mvlink2.
Post a link to a .bin flight log.
Hello @dkemxr
Please send your mail id there we can send logs file for respective flight.
You can upload .bin logs to a file sharing service like DropBox or Onedrive (for example) and post a sharing link here (or send a PM to a person).
To get best support you would share with all of us.
If the location is sensitive you can anonymize the log in MissionPlanner.
Exactly as Shawn has suggested. Everyone benefits when it’s shared on the forum.
Hello @xfacta & @dkemxr Please find the log of respective flight
https://drive.google.com/file/d/15N_cUmYfELXz0r_Sxy0pWXgYqUvSDzQM/view?usp=share_link
You are using an old version of firmware, update tp latest Stable. After doing so make sure EK3 is enabled not EK2 as you have now. Tuning is poor with Motor output oscillation as mentioned. What’s the prop size and what Battery power? Use the Initial Parameter Setup screen in Mission Planner to set the basic values.
I think you will need to drop the Rate PID’s until the oscillation is greatly reduced. Try default 1st. Plan on setting the Dynamic Notch Filter so set these:
INS_LOG_BAT_MASK,1
INS_LOG_BAT_OPT,4
And these:
INS_ACCEL_FILTER,10
PSC_ACCZ_I,.70
PSC_ACCZ_P,0.35
I don’t know why the outputs are not showing in the MP tuning window. Perhaps they are and the data rate is just too slow to be of any value. What are you trying to achieve by monitoring this?