If someone could look at my log I would appreciate it. This is a known stable aircraft with many flights. I removed a here link system and went back to conventional RC for some other testing. I had two full batteries of flight and one pitch and roll autotune on the airframe, I then replaced the battery and went out for a second AT. Part way through the pitch axis tune all motors stopped and luckily it was at low altitude and went flat down in the grass with no damage. I looked at the log and saw that power was uninterrupted but RCOUT cut off clean on all four channels. I looked for obvious wiring or connection issues and subsequently had two identical failures within the first couple minutes of flight. The attached log shows the event and i walked out to the vehicle and it remained lit so I re-armed and flew it back to the launch site. CubeOrange with Andy’s FFT master
(that combination has seen multiple good flights)
Thats only your personal link.
Cant get in to see your log.
Thanks Mike, I thought that looked strange. This should work better
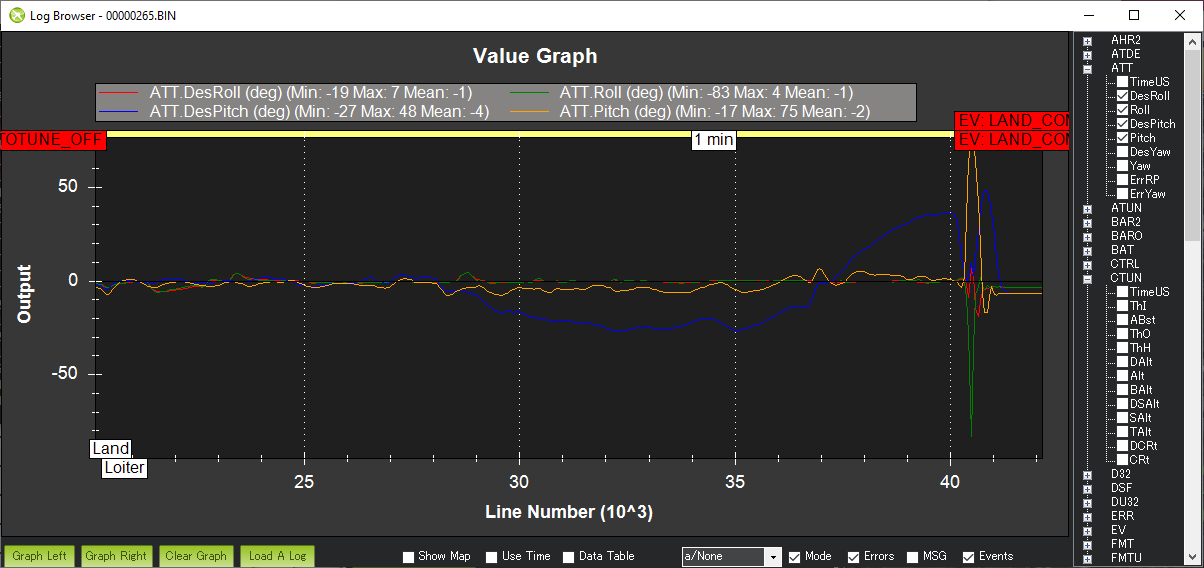
In the log I’m looking at it appears it crashed while in Loiter mode about a minute after arming and the cause appears to be the crash check which has probably fired because the pitch control seems very bad.
The blue line shows the Desired Pitch and the orange line the Actual Pitch. It’s probably best to resolve the tuning issue but it’s also possible to turn off the crash check by setting FS_CRASH_CHECK = 0.
It’s very difficult for me to provide support for non-standard versions so I’d much prefer if you could move to 4.0.0-rc3 but I will ping @andyp1per in any case.
I don’t believe this is anything to do with the FFT. Load is at max 28% and the notch frequency tracks the loss in power quite nicely (you can see the throttle go to zero and then soon after the notch frequency reduce)  I do notice that that RCIN.C2 goes to 0 just before the incident - could this be related?
I do notice that that RCIN.C2 goes to 0 just before the incident - could this be related?
Thanks to you both for helping me out on this one. I feel rather foolish now, I knew the tune was horrible and was in the process of sorting that out but didn’t even give a thought to crash detection. Part of the problem was trying to do a quick switch from Herelink back to conventional RC. The Herelink is it’s own animal. I did a clean install with standard parameters and a proper setup, flies like it should now. Thanks again, I’ll add that to my learning curve😎
Randy Bachtell