Can someone help me understand the rcbind command?
Firstly, does this initiate the MAV_CMD_START_RX_PAIR (Command #500) as I think it does?
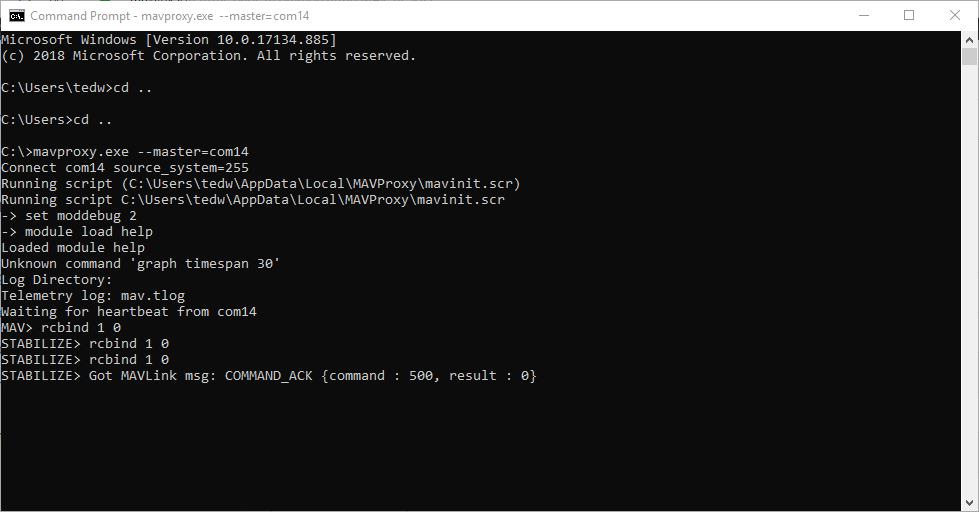
Is the context rcbind [param1] [param2]?
The terminal returns confirming command #500 and result:0; which should mean message received and executed; but I dont see a change in the lights on my RX
Side note: I am trying to put a Yuneec SR24 into bind mode per the following:
RC Binding
To bind RC, you either need to send the bind command with param1 = 1, param2 = 0.
Source: https://developer.yuneec.com/documentation
Currently, the LED on the SR24 is blinking (i think slowly?) and I am expecting it to turn solid to show it is in bind mode per this manual
Am I doing anything wrong?