I’m trying to send RC overrides using a python script with pymavlink in RealFlight SITL. I noticed that RC input overrides are not the same as RC outputs.
Here’s a brief walkthrough of what I did to investigate the issue:
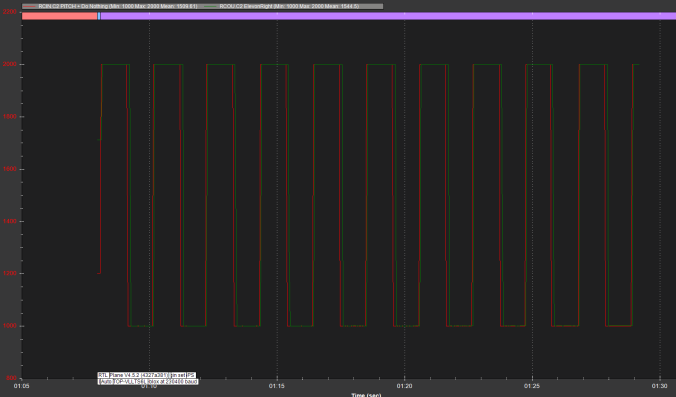
- I inputted a square PWM in AUTO mode preceded by the wait command:
vehicle.wait_heartbeat(). RCOUT matches RCIN in this case. This was in SITL where the plane was stationary, and I was just testing RC overrides.
- I tried the same setup while flying, but RC output did not match RC input.

Could there be any considerations or configurations that I’m missing?
I’d really appreciate any help.