I am trying to play around with Mission Planner SITL but using my joystick. I am using FrSky X20 Tandem.
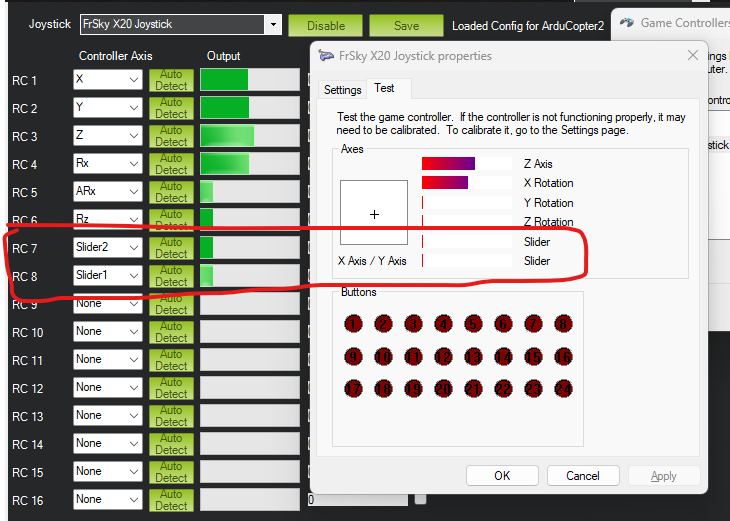
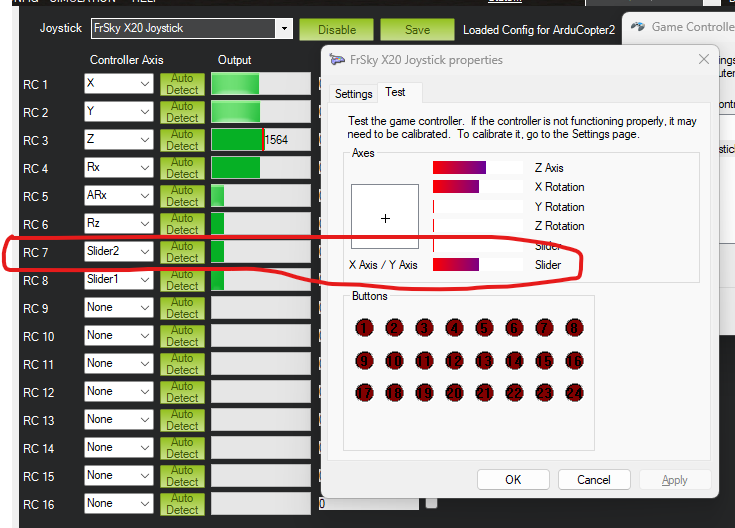
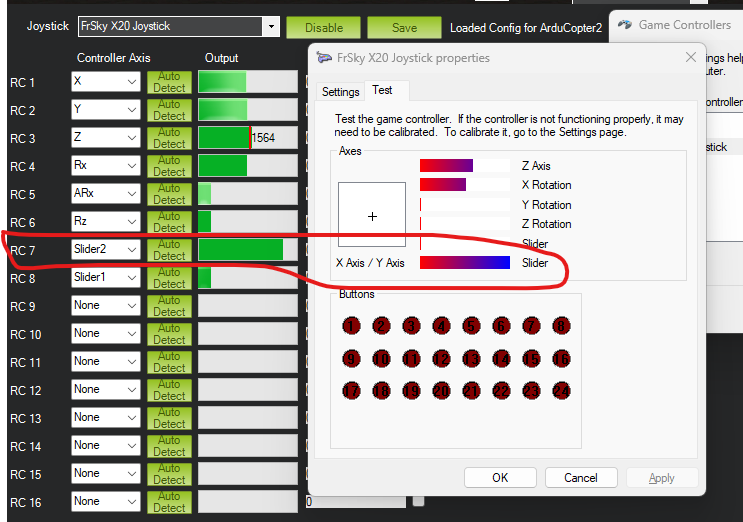
When using Mission Planner with joystick mode, for switches, it only detects HIGH and LOW. For instance, my channel 7 operates on a 3 switch control, which means I have, LOW, MID and HIGH option, but Mission Planner skips this MID value. See below diagram for more info (Keep an eye on Slider 2):
This also occurs on other 3 control switch on the joystick so I am assuming this would be a bug in Mission Planner considering that it works fine on the joystick driver.
Do you face the problem of not getting the same PWM value between the same channel for RC and GamePad? I mean, for example, your channel 7 in RC low, mid, and high are in different values on the gamepad.
So, after Joystick detection and hitting the Enable button, the user cannot arm the copter because Throttle is not the lowest and Yaw is not the highest.