I always try to read through the whole text that people go to the trouble of writing, and I try to get a sense of what they mean if it’s not clear - and I dont doubt I am sometimes wrong. My typing doesnt come across as compassionate (I know) , although we are not here for that. I am just trying to get out what I understand, and trying to help.
Feel free to call out when I am wrong or I misunderstand.
On reflection @KimHyungSub did describe the situation quite well.
The failsafe link provided is completely correct as far as I can tell from the actual code.
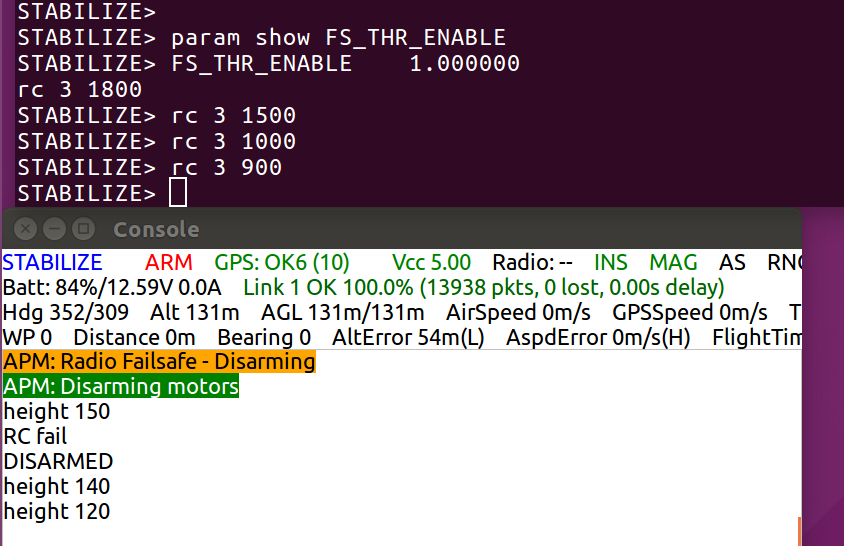
The behaviour noted by @KimHyungSub is to be expected, because as the documentation says, just a radio failsafe doesnt cause disarming.
To disarm while in flight the throttle must also be at minimum throttle AND you must be in Stabilise or Acro mode, and I think this should take at about 2 seconds.
The difference will be if using a modern receiver where it initiates RC failsafe because of signal loss (rather than some lower than normal throttle value) in which case throttle and other channels will be ignored until the RC failsafe is cleared.
I’ve never had a disarm-in-flight event from RC failsafe, but then it would be very rare for me to have throttle all the way down in any mode but AltHold or Loiter. In fact, I’ve never had a disarm in flight for any reason.
I’ve used receivers that needed binding with the throttle channel set below failsafe level in order to trigger failsafe at the required time, but still never had a disarm. So you’d need a way to trigger failsafe THEN throttle goes low - which I think would be very difficult to achieve in real life.
Ideally you would use a receiver with a proper SBUS implementation (which indicates radio failsafe to the flight controller via the data stream) or a receiver that uses some other modern protocol that indicates failsafe without the need to rely on throttle PWM value.
Or at least a receiver that can be set to “no pulses”.
I think in those cases the throttle value wont matter, because you will already be in RC failsafe and performing the configured action, such as RTL.
It would be wise to do your own tests with your transmitter, receiver outside SITL, but without flying.
Maybe someone with a tiny woop that’s fairly immune to crashes would be able to test the acro/stabilise “disarming in flight” issue for us.
I’m going to test this more in SITL, but I cant test it in flight with my copters.