I’m struggling with getting ACRO mode work properly in my airboat vehicle. The point is as soon as I turn it on, the controller (PixHack 2.8.4) sends output to the motors (actually, to the left motor only) even when there’s no input from the RC (throttle stick is at its minimum and the steering stick is in the middle).
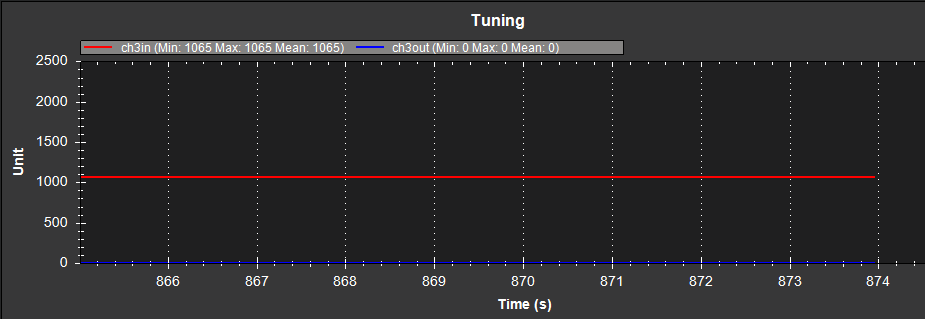
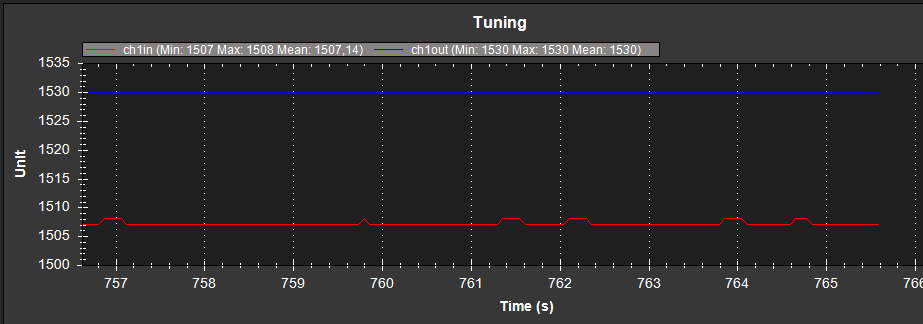
I decided to compare in and out of the RC in GCS. Throttle:
Check the servo3_trim value. It should be at 1500us not 1000us. Missionplanner tells you to put the throttle stick in the down position during rc calibration, but that is not correct for a rover/boat setup. All sticks used for throttle/steering should be self centering and in the middle position at the end of calibration.
I never build a rover/boat without reversable motors, but then the problem should be the opposite of what I wrote before.
Make sure the servo 1 and 3 trim values are at 1000us (same as min value) and the sticky/not centering throttle stick is down at the end of RC calibration. A non reversing setup is not officialy supported, so you may have to improvise a bit.