Ok here’s what I have. I’ve been a copter guy for THE LONGEST time now and started seeing some stuff about VTOLs online and in some of the forums I frequent. I went and bought the cheapest one I could get that would allow me to still get a fair feel for flying one… I went out and bought the FIMI Manta. One thing I can’t figure out is how in the world to I get the radio transmitter to calibrate?? I’ve tried everything including everything you’d normally do when setting this up in Copter… been having a rough go of things here in ArduPlane trying to get used to everything… I’ll attach some images and give a brief rundown on my equipment…
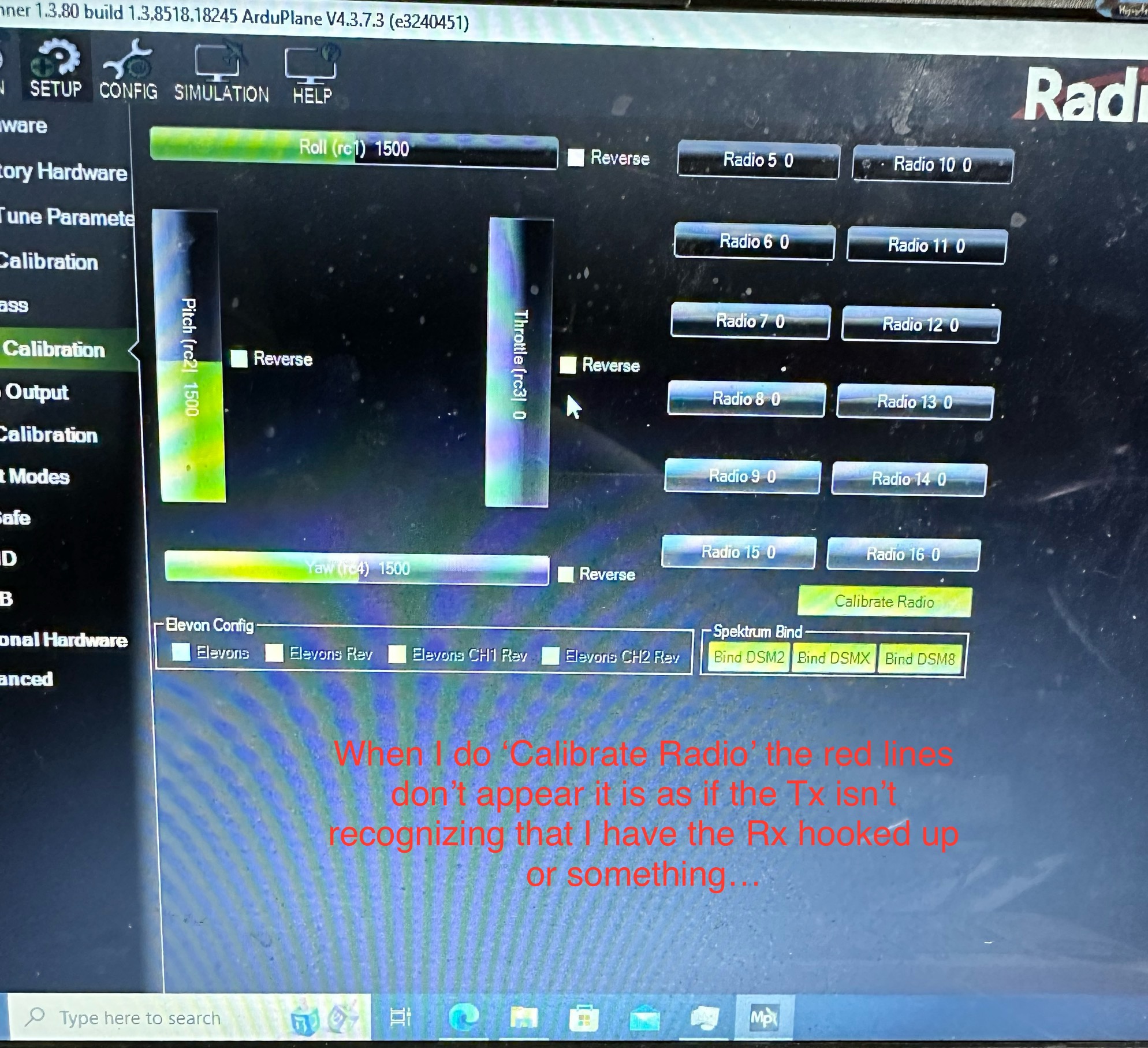
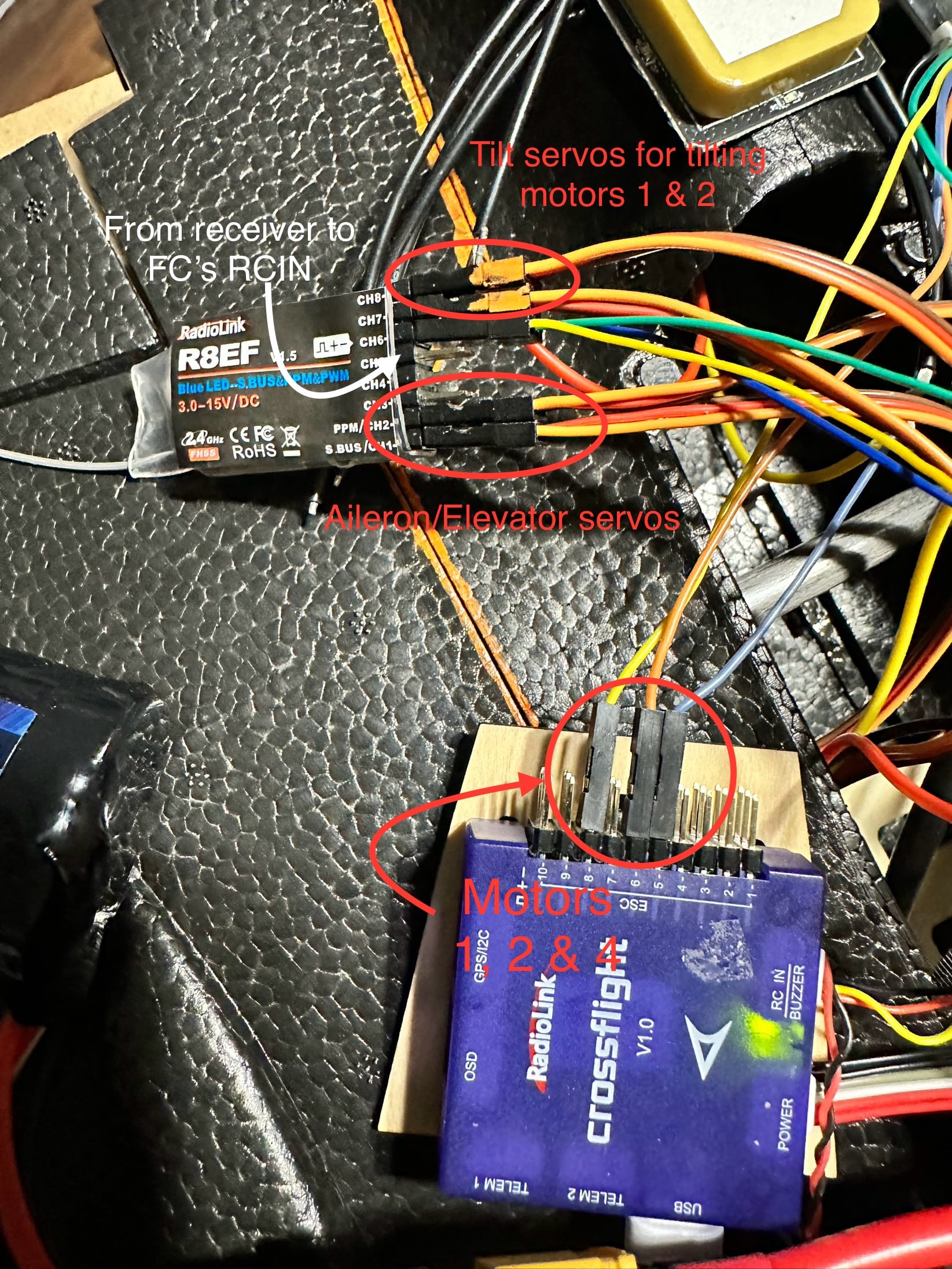
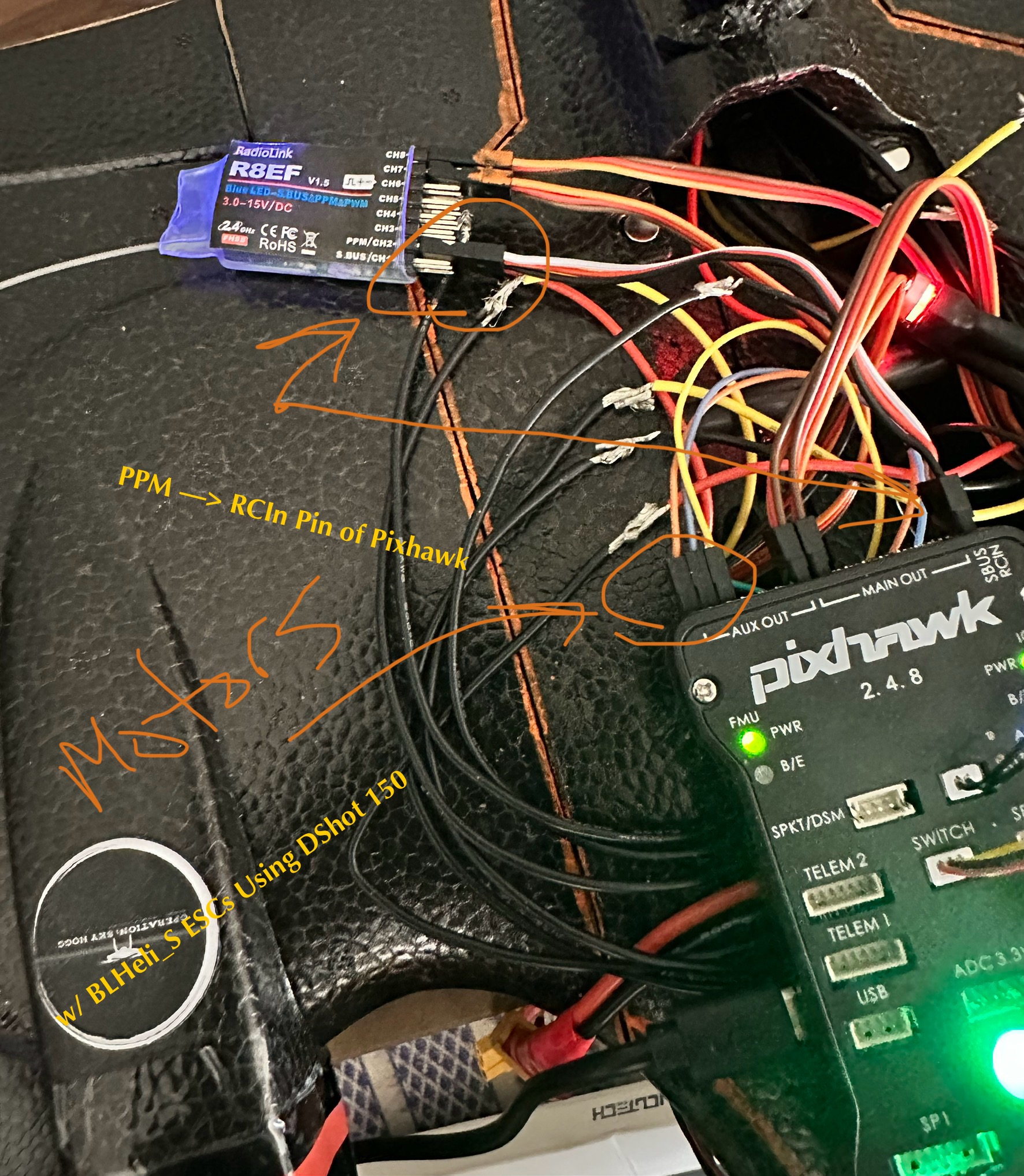
Hi thank you both for making the above known to me. I have since sent that FC board back to where it came from and invested in a standard pixhawk 2.4.8 board. I’ve had luck with programming while building my multi-copters. Now then, I got everything hooked up like it I had it before (using the new fc board, obviously) and I’m using the PPM output on my RadioLink Rx. With this input, I’m getting some responses from the Rx via the Tx now. However, not all is working as it should… for instance, when I plug in with the usb cord and plug battery in a short bit later, the ESCs and motors go NUTS! (Attached video). I’m having issues setting up the elevator/ailerons in CH1/CH2… I’m getting the response from the Rx but it’s the wrong response… also, to help you all to better help me, I’m attaching example of what my RC and Servo response looks like in the Mission Planner as well as my current Parameters List… Please help me get in the right direction here… All help will be GREATLY APPRECIATED.
Why don’t you use the SBUS output of the receiver? This makes it much easier to set the RC failsafe, for example.
In the first picture you have connected the tilt servos and Aileron/Elavator servos to the RC receiver ? Why that ? They also belong on the flight controller.
Thanks Rolf for replying. Ya know, I tried using the SBUS connector in the beginning and the fact that using that option gave me no Rx response whatsoever; while under the RC calibration tab in MP, when I go to toggle the joysticks that govern channels 1-4, no response whatsoever was registered on that tab…
I’m betting it’s something I don’t have done right in the params somewhere (like a wrong param or a parameter that’s supposed to be enabled but isn’t for some reason….)
I mean I use a similar Tx/Rx combo (also by RadioLink) with the multicopter build I finished over the summer and absolutely no issues with the Tx or the Rx…
I don’t own one but according to its manual; which color LED light is blinking?
PWM signal output working mode - Red LED indicates PWM signal output, 8 channels Total
S-BUS&PPM signal output working mode - Blue/purple LED indicates SBUS&PPM signal output, 8 channels total
S-BUS&PPM and PWM signal change: Quick press the ID SET switch twice within 1 second, the signal is changed from PWM to S-BUS&PPM. The red LED indicates the PWM and blue/purple indicates S-BUS&PPM&PWM.
Finally got all the other stuff about worked out EXCEPT after calibrating ESCs MULTIPLE times and reviewing every parameter I could think to look at, this damn thing will only spin motor 1 when I arm it. Won’t spin 2 or 4 just 1… when I attempt to test the motors in mission planner, for some reason I when I try to spin either one of them, it causes the ailerons to jitter…. I’m not certain what’s going on…… help?
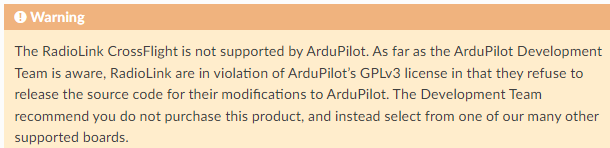
Before I knew better, I got the Crossflight. I can’t return it at this point. That’s okay.
Just wondering if all is lost? or can they sort of be made to work? Maybe I could use it on a low key Rover? While not optimal auto pilot, have any of you heard of them working to some extent?
thanks
Who knows. They are not supported by Ardupilot so you have to use whatever version of firmware Radiolink has available and you are at their mercy for updates. Looks the last (only?) was 4 months ago. I don’t recall anyone on the forum here posting about them.