Hang128
December 2, 2022, 8:39am
1
Hello, everyone
I’ve learned wiki and code, in my opinion, I should set param as follow:
keep all EK3_SCx_PosZ = 3-GPS
set RNGFND1_MAX_CM = 400
set EK3_RNG_USE_HGT = 50
Then, when rangefinder alt<2m, it uses rangefinder. and when rangefinder>2m , it uses GPS.
Hang128
December 2, 2022, 8:43am
2
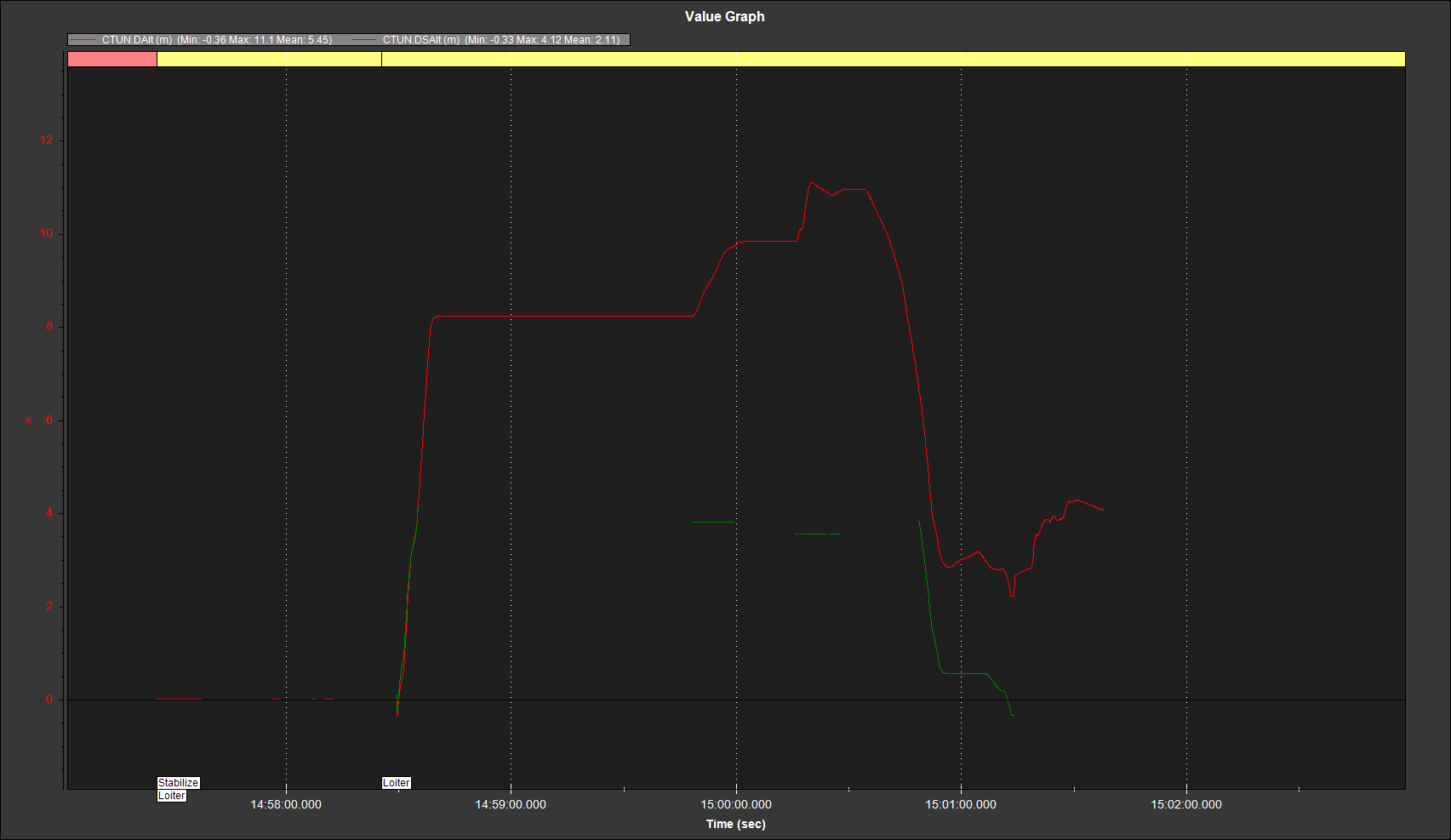
But actually, my copter will use rangefinder to raise to 4 meter, which is same as RNGFND1_MAX_CM.
Hang128
December 2, 2022, 9:08am
4
This is my basis,
Now I can only distinguish althold source through who is horizontal. Or there could be a better way?
Jai.GAY
December 2, 2022, 11:14am
5