I’m posting this here and on the Facebook Ardupilot group. I think the participants are slightly different - and wanted to include everyone who might be interested.
I got a tip from Josh Henderson about the “glossary” of BIN file parameters - it had been on my list to seek out - I knew it must be in the docs somewhere. Sure enough - it is!
Looking through it I discovered that there is a section specifically for rangefinders. I was wondering how multiple rangefinders were reported. Each has it’s own set of entries.
The ArduPilot doc section on Optical Flow Sensor Testing and Setup has you check the rangefinder by examining the BIN file’s parameter EKF5.meaRng. This parameter no longer exists. It’s now XKF5.x.rng.
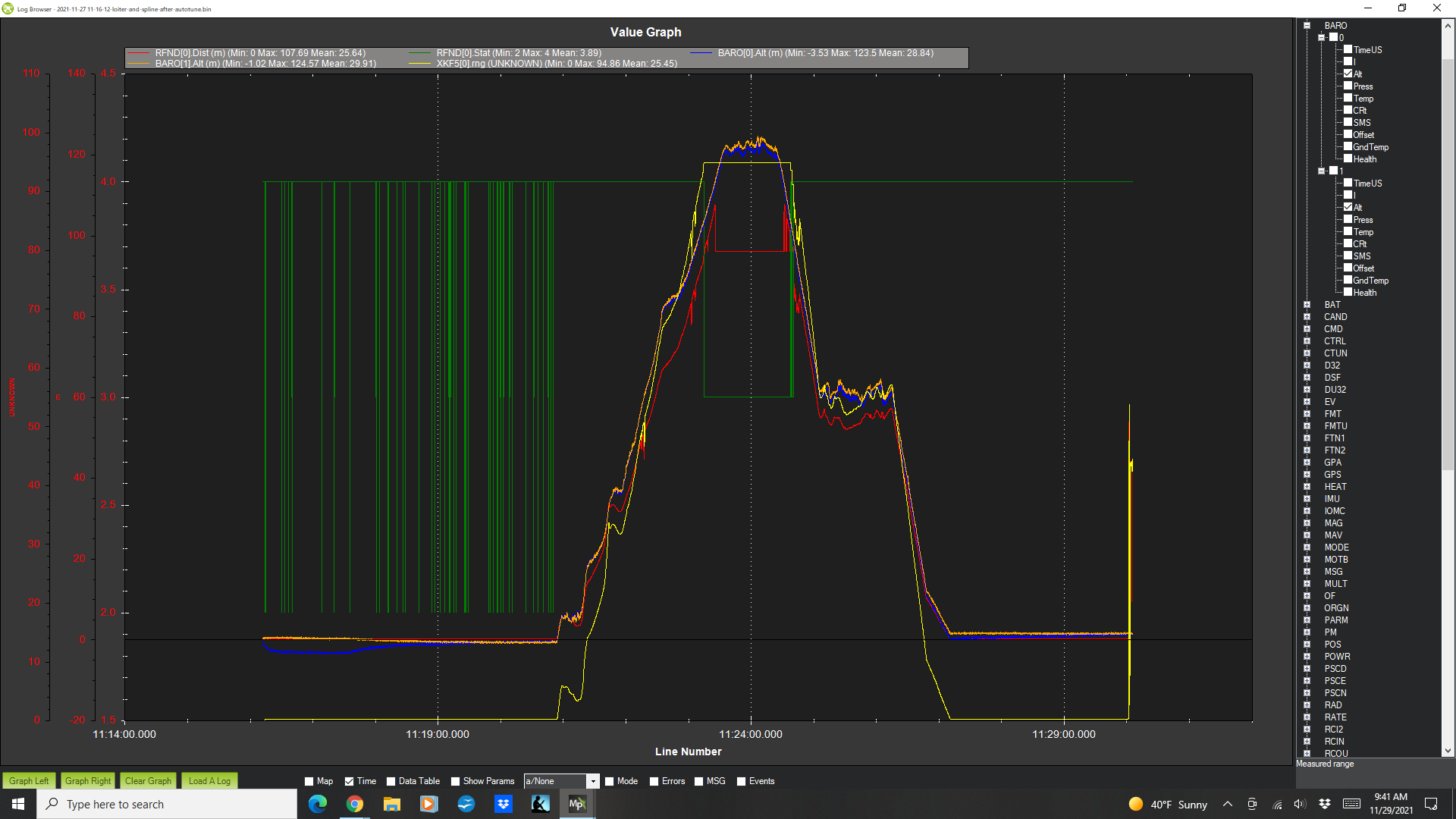
The parameters specific to rangefinders are RFND.x.nnn. In my case, RFND.0.Dist for distance. I don’t know exactly how this differs from XKF5.0.rng - so I’ve graphed them both to take a look. I’m still not quite sure.
The RFND section also has a parameter “stat” that counts errors.
I’ve put all this on one graph for a look at it all. Note - I have log_disarmed set to “1” so the BIN file starts some time before takeoff. Also curious about the rangefinder “stat” events while still on the ground.
Also interesting is how the data is recorded when about 9500cm - the upper limit I set of rangefinder distance. This is just short of the 400’ I flew to. Interesting to see how things are handled when exceeding 9500cm.
I’ve also included the data from the two barometers on the Orange Cube.
I found this all pretty interesting - and thought it worth sharing.