HI !
I am facing a bit of strange behavior from the nano-radar rangefinder attached to my quad (pixhawk) AC 4.3.7.
The sensor is a bit noisy above ground but it’s state should’nt reverse automatically.
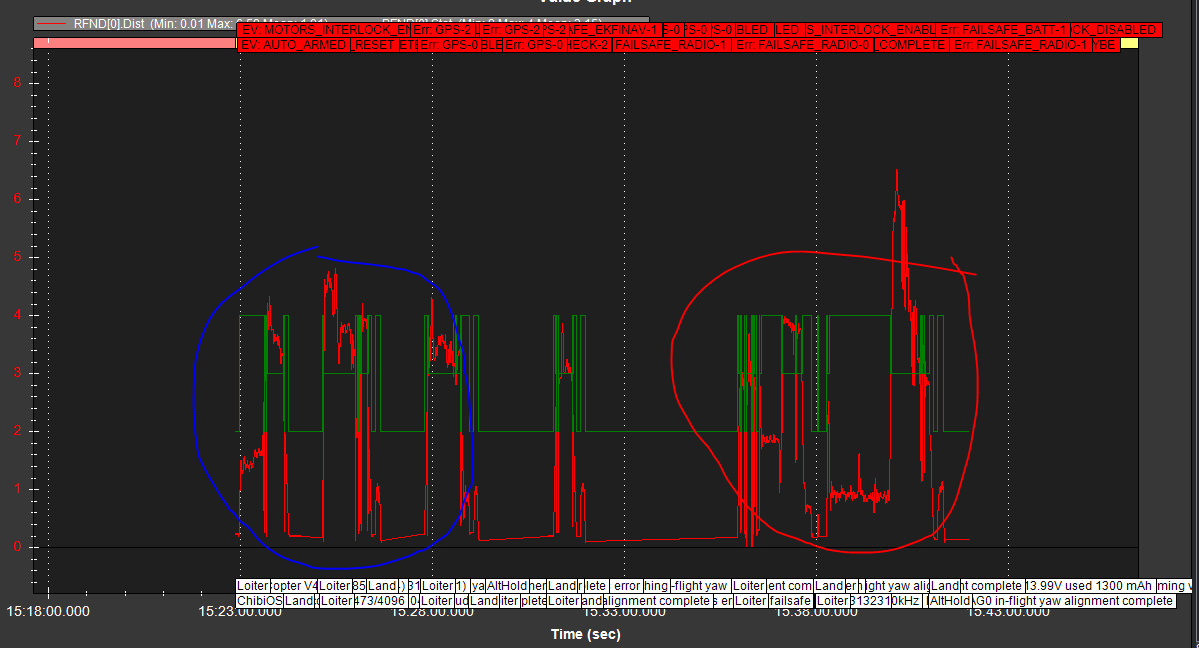
Like in the following picture from the LOG (green line is the sensor state):
The quad behaves normally sometimes and abnormally often. (like if there is an obstacle or surface increase below it, it gains altitude, but sometimes in the same normal flight it looses altitude when obstacle or surface rise comes below it).
Rangefinder filter is set to 2 Hz.
Where the problem might be ? Can anyone please share there views ?
Thanks.