Hello, Attached you will find *.bin regarding issue.
2017-01-27.13-01-23.zip (4.0 MB)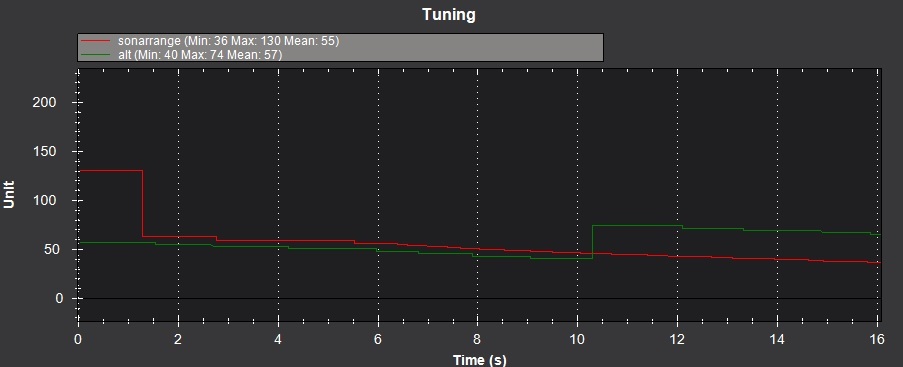
SF11/C is connected to uav but not used during this flight (ch8 option set to range finder and not activated.)
After auto-mission using barometer, I switched to RTL.
When drone come vertical point of takeoff point, it started descend à 200cm/s as tuned.
BUT it landed at this speed.
It not slowed to 50cm/s for final toutch-down as tuned.
Hopefully, I dont break anything.
Regarding log we can see SF11/C glitch occured during rtl from AGL to out of range value of 130…
How to explain Baro offset occured during landing while sf11/c is working well (below 50meters)? this cause crash (landing at 2m/s it’s a crash)
So following logs and print screen on the top of this post why barometer (in green) was offeseted by 30 meters during final descent?
This cause crash…
Here also the telemetry logs:
2017-01-27.12-57-14.zip (816.9 KB)
Interesting NKF5 view:
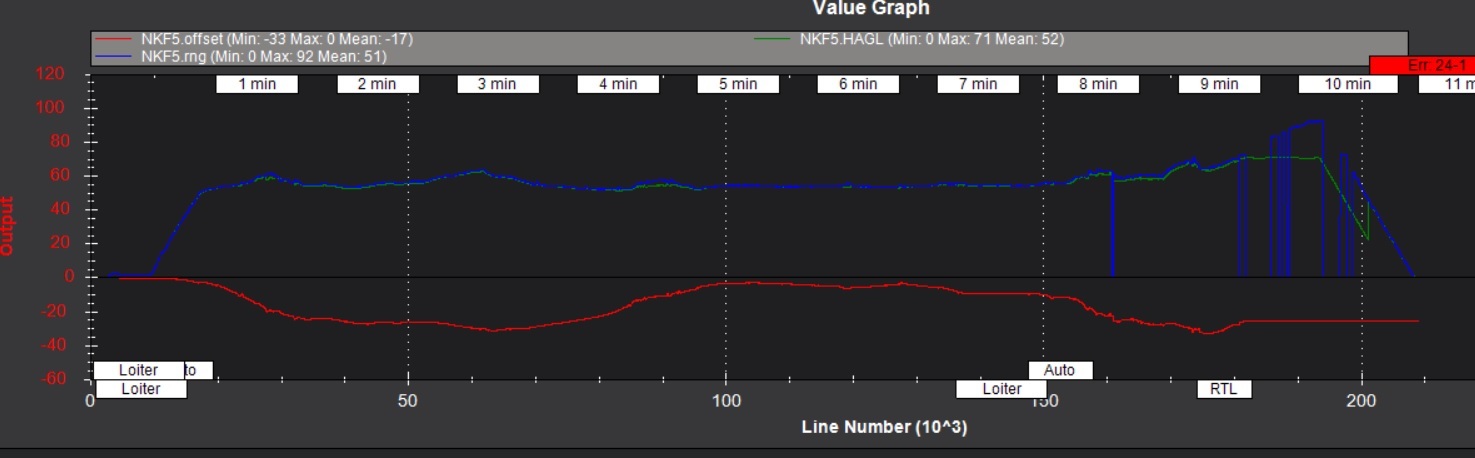
EK2 not resumed reading values of the range finder at the right time.