Hi,
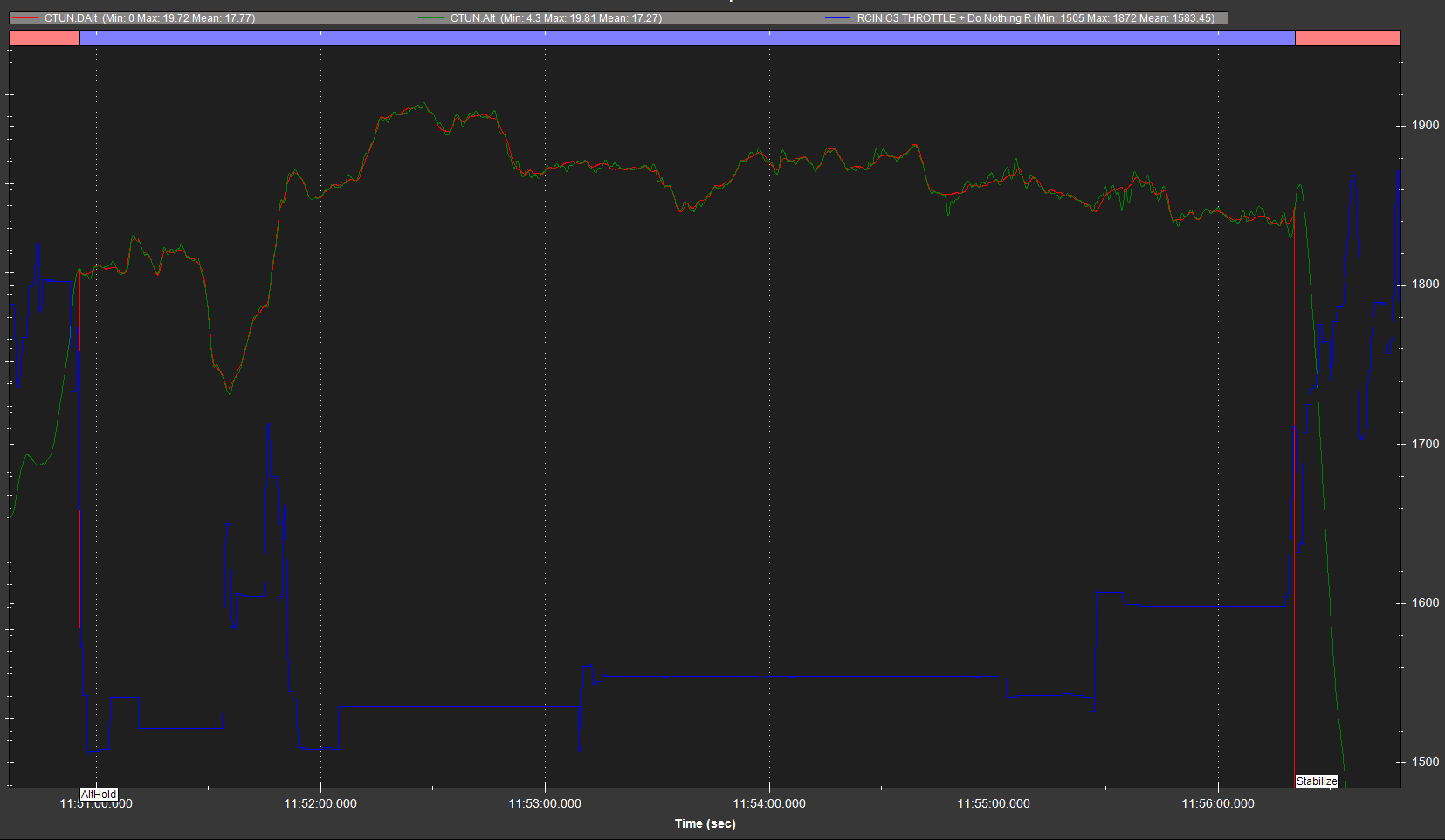
I’m trying to tune an UAV helicopter. It is stable in air and Roll / pitch seems good. In the ALTHOLD helicopter keeps the altitude, but desired altitude randomly changes by itself. At the picture are signals desired altitude(red), altitude(green) and throttle stick from RC(blue).
Deadzones are from 1400 to 1600 pwm. As you can see, i had throttle at midstick and desired altitude still randomly changed.
I think it’s some kind of autopilot software feature that I accidentally turned on.