I brought out my quad for some Spring flying. Did a few tests of pos hold, landing, and basic flying to see if the it still worked after the long winter. All worked fine. The copter held well in pos hold and I could fly it around with no issues.
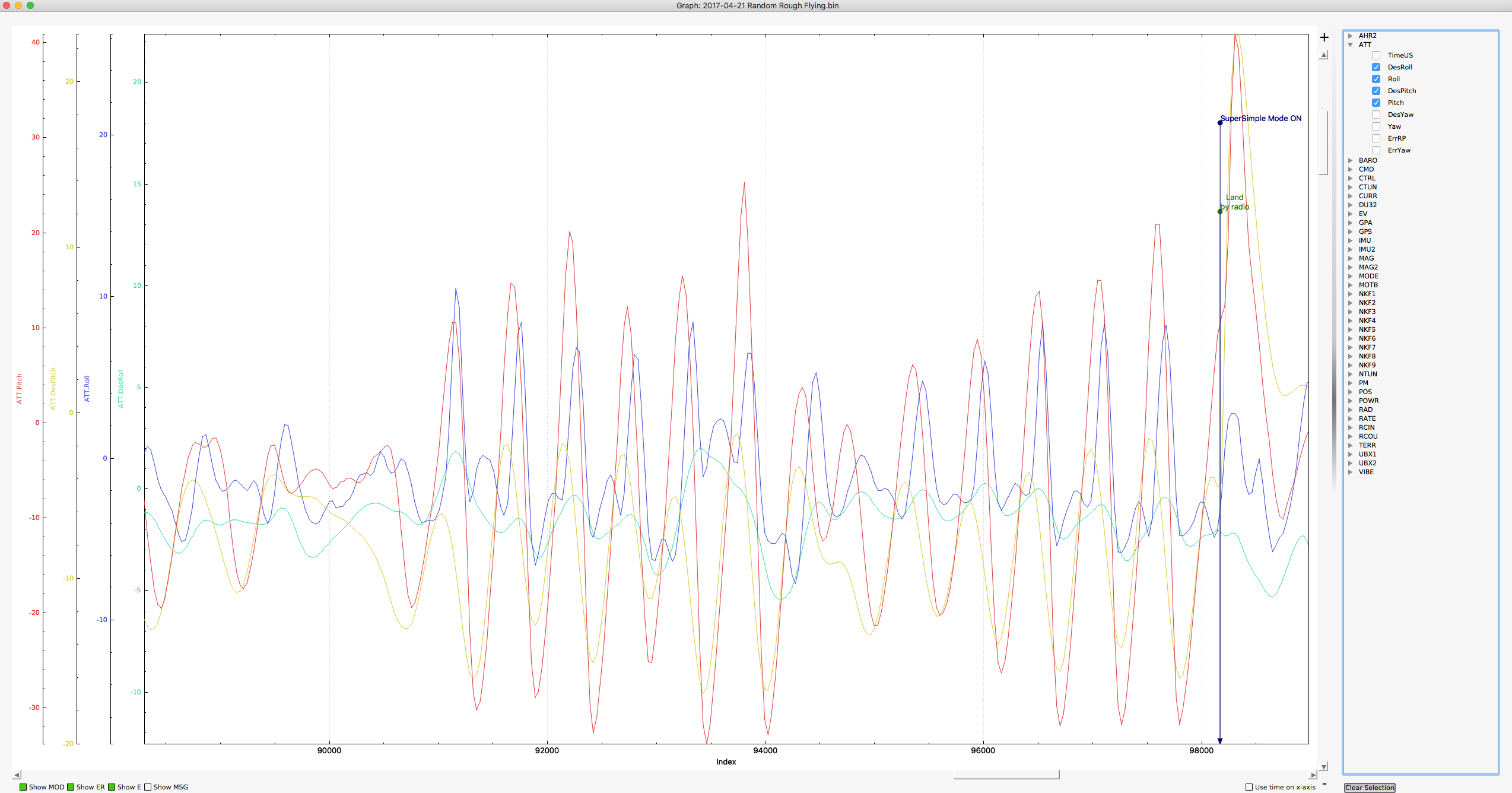
I loaded up a simple mission planner mission and sent it out for a run. While on the mission in Auto mode, the copter at time flew really rough with large oscillating swings during parts of the flight. Looking at the log, you can see exactly when these happened by looking at the RCOU.C1, C2, C3, C4. As you can see it happened at different parts of the flight.I actually decided to land it in a field as I was afraid it would flip as the swings were that extreme.
The only changes from last fall is I loaded on my pixhawk Copter 2.4.6 and bought some new CF props. I balanced the CF props. The frame is a F550, 9443 CF props, PixHawk controller, and 2212 940 KV motors.
Mike, correct I was using version 3.4.6. I was running 3.3.3 all of last summer and fall. I did do a retune of the rig after I loaded the firmware. I did not change the PIDs with the new firmware. Would not updating the PIDs have had this effect? Can you tell anything from the logs?
Thanks for your help. I will try to go out and autotune again to see if it then behaves better. The forecast is for rain/snow this weekend so it might be until next. I will report back what I find.