Hi,ALL,
Rambler RS is really a good plane,and it has been safety flight for 7 hours(FLT TIME),But in the last few flights, it became random maneuver which cause the plane crash.
The plane was installed the flight controller of F405 Wing flashed firmware of arduplane3.9.9
The servo throw of pwm was set from 1100 to 1900.
First crash:the plane was climb to ALT of take off in auto mode,then it switch to first waitpoint at 170M height ,suddenly it became random manever,I could see the plane spinning in the sky from the video transmitter screen,I switch to RTL ASAP,it doesn’t go back ,then i swich to manual but can’t save the plane.
Second crash:I lauch the plane in auto take off after i fixed the plane,the plane was climb steady first ,then i became vacillate to the left and righ,i switch to manual immediately and save the plane .
the third crash :i compaire the PID with default PID,and find out the PID is a little bit lower than the default PID,I reset to default PID and then lanch again and do autotune agian then the the plane was landing safety ,and i lauch the plane again ,first it climb steady for about 30M then go into random maneuver again then the plane was crash.
PLus :my friend have the same plane ,he also have the problem like this ,so i think it’s critical for foud out the reason of crash.
I’ve analyzed the flight records of last crash.
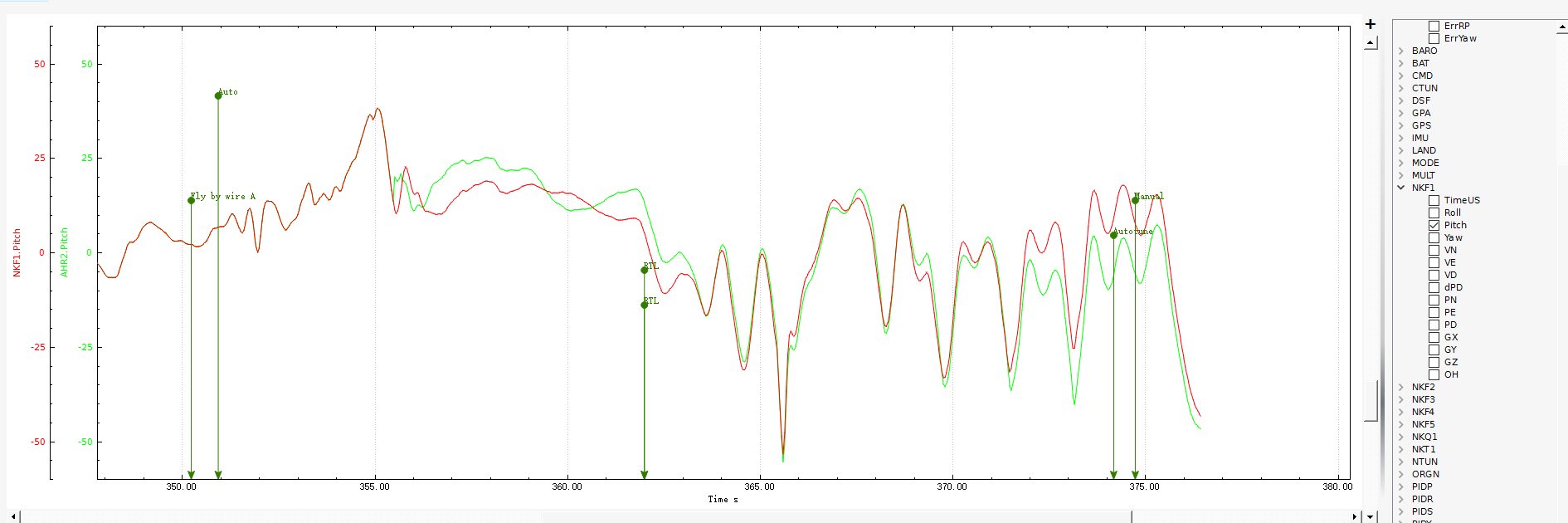
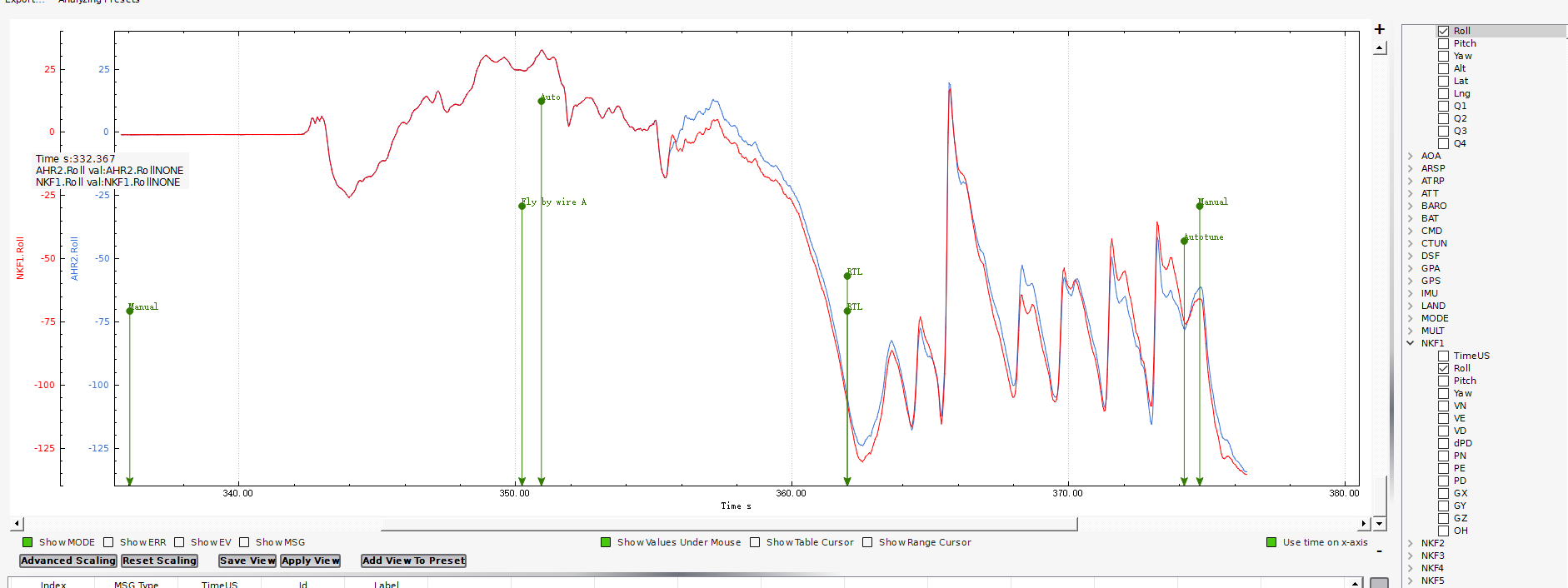
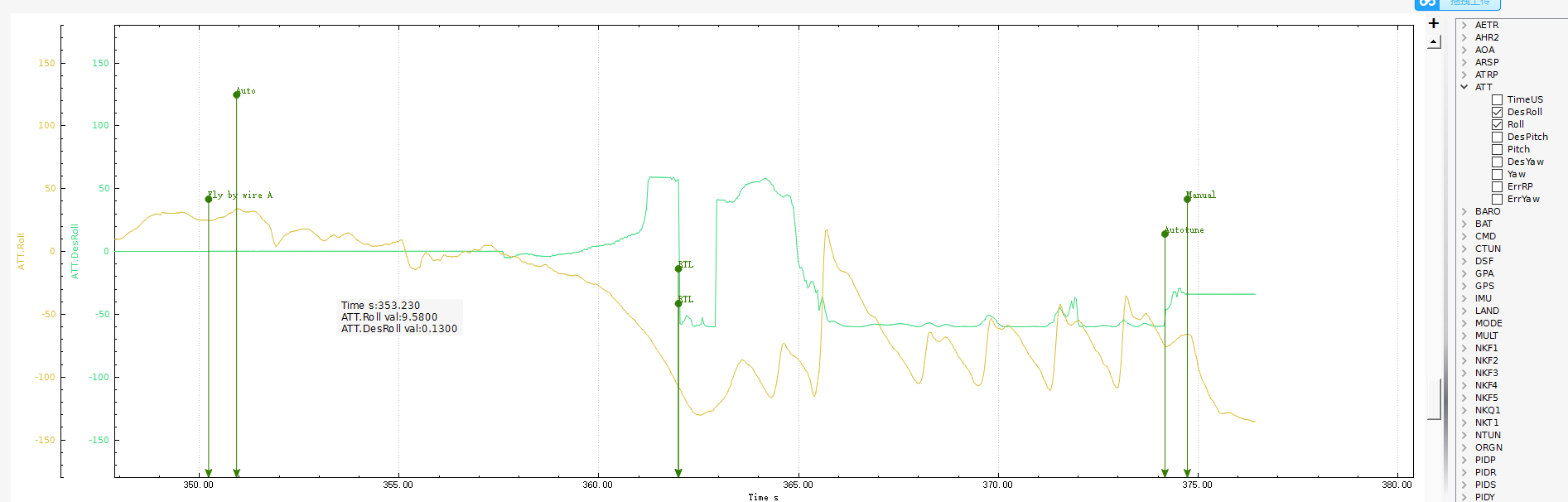
First the plane climb steady for several seconds then the roll and des.roll became separate,the roll can even go up to -130 degree,but during take off the wings will be held level to within Level_roll_limit which is defaut value ,why can the roll go up as much as -130 degree?
and Whether the servo throw range too much will affect the stability of the aircraft .i have switch to manual mode in normal fligt ,found it’s really hared to control the plane because of servo throw too much ,the plane react very fast,but in FWBA mode it became very stable,so i thought the FC can control the plane becaue the CPU running very fast.
I wasn’t sure if the cause of the crash was because the servo throw was going too far, because I hadn’t had this problem for seven hours before
Hope some one can analysis my log of last flight and find out the problem ,Thanks !
the log is below