Hi, so I am trying to get the plane simutator to go to closest rally point when in RTL mode but it is not doing it.
Here is the mission and explanation of what happens.
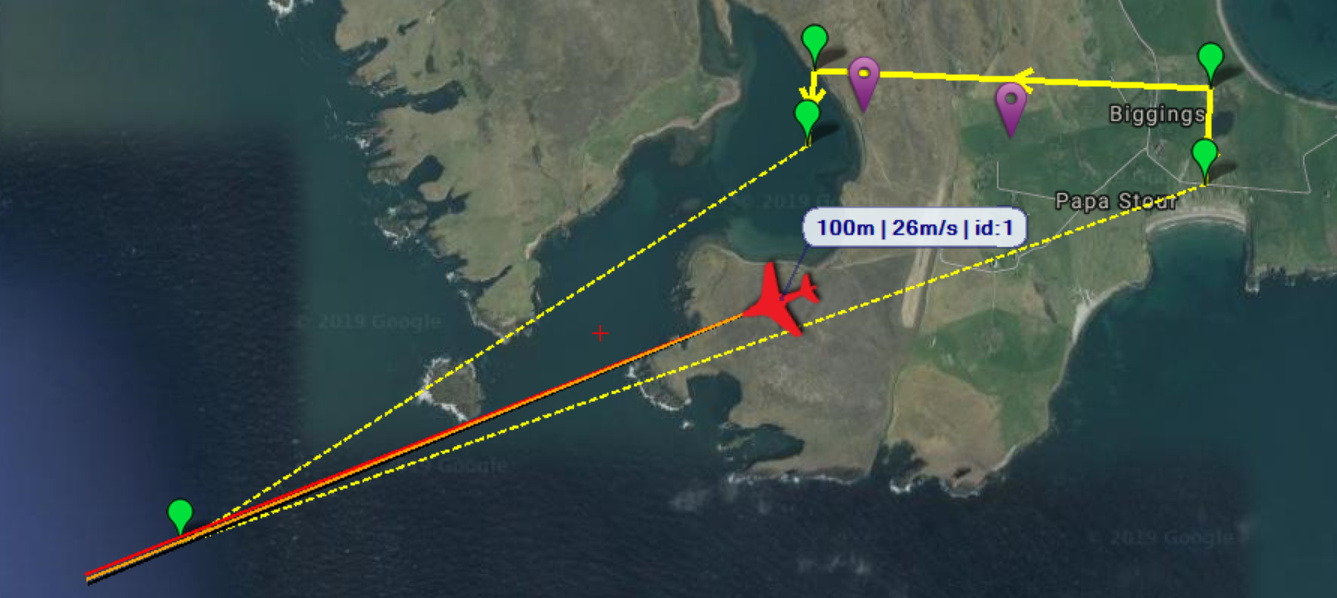
This is what the plane does when RTL mode is selected. The plane turns around and instead of going to the nearest rally point it goes to the home point bottom left.
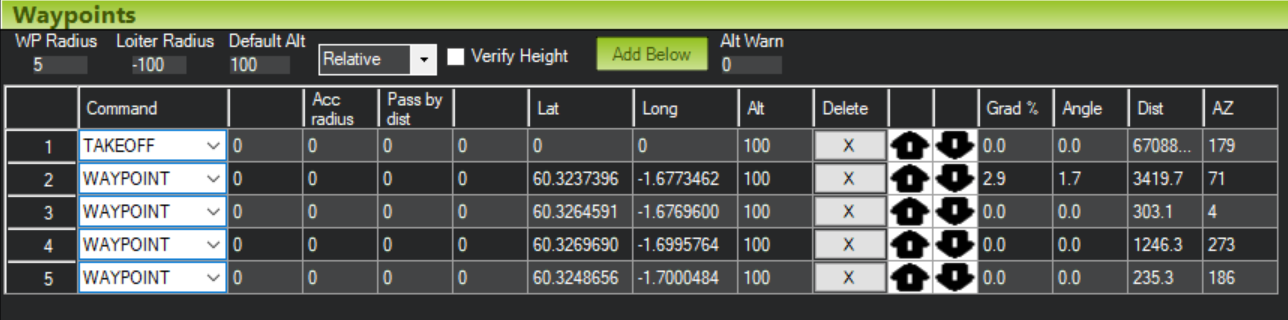
This is the mission.
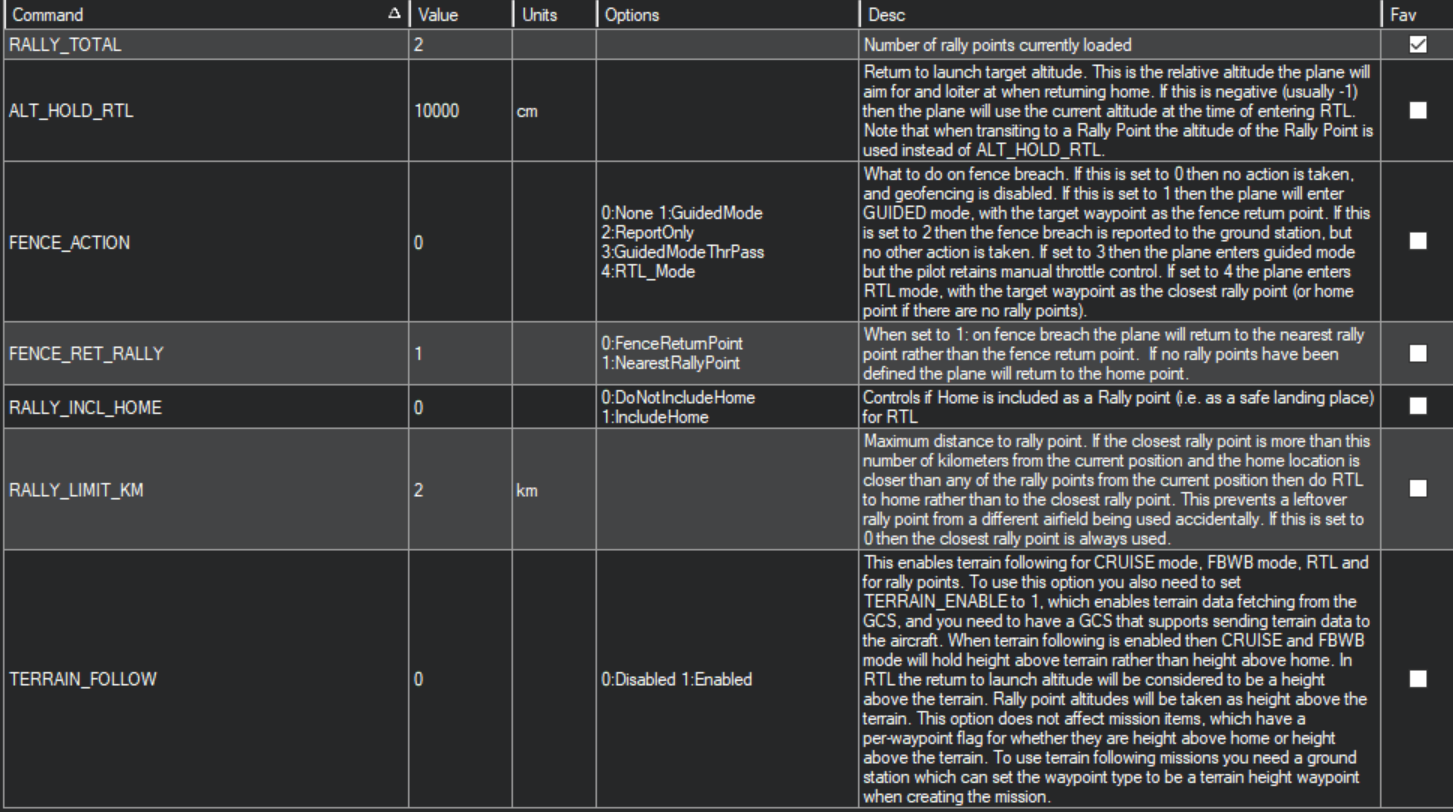
These are the parameters.
What am I doing wrong?
Any feedback will be appreciated.
Thanks