Hi at all,
we are testing the Skydrones Airlink Core autopilot with the Arducopter firmware version 4.4.0 (for Airlink board) but we are facing with an issue relating to the “Radio Failsafe”.
We tested the newest 4.4.3 firmware version also but the problem is the same.
In detail, we don’t use a R/C receiver connected to the SBUS channel but we use a Taranis R/C Transmitter as a joystick (connected to a PC via USB cable) and all the main RC channels are in the correct range (between 1100us and 1900us) when we check in the Mission Planner “Radio calibration” page.
After we completed all the initial calibration (IMU, compass,…), joystick enabled
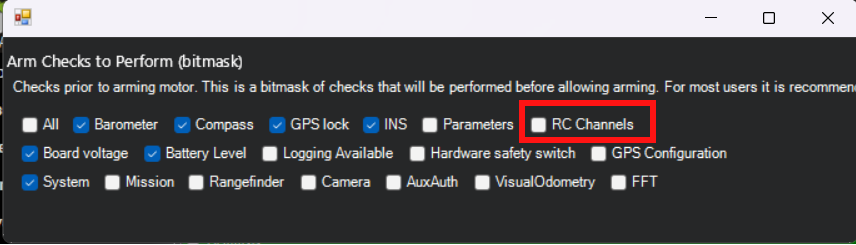
and switched to “Stabilize flight mode”, when we try to arm the drone immediatly we receive an “Radio Failsafe” error as you can see on the following picture

(we have the following “Arming check” enabled).
Our radio datalink is stable and works fine and never the PWM THROTTLE signal decrease under the default Radio Failsafe threshold (975 us).
if it had been a radio problem, it would have occurred even before the arming check control.
Furthermore, if we disable the arming check control the problem desappear and we can arm the motors but this is strange becouse we should see the radio failsafe problem anyway.
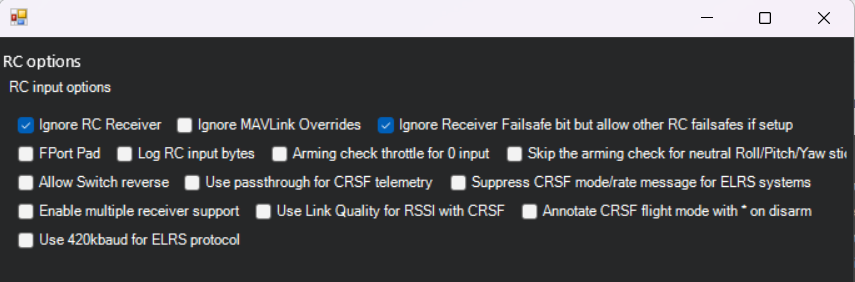
We tried the following options also but the problem is the same.

For us is mandatory to enable the “Arming check” control to increase the safety level.
We tried to change the joystick (R/C Transmitter) with another that we know that works well but the problem remain.
We tested the same 4.4.0 firmware version on Cube Orange autopilot (for Cube Orange board obviously) and all works fine.
Could someone help us to solve the problem ?
Thanks for your time and patience.