Having a Quick Tune issue. I downloaded the lua script and added it to the SD card on the Kakute H743 Wing flight controller on my tank. A couple weeks ago, I saw RTUN_ENABLE, set it to 1 and ran Quick tune. I aborted it. Now that I’ve gotten the tank together better I’d like to rerun it. I set SCR_ENABLE=1, did a “write params”. rebooted ardupilot using “reboot” in the compass setup section. Did a refresh params, and SCR_ENABLE is 1, but cannot see RTUN_ENABLE. Its not in the param list. What am I missing? I wondered if the SD card file was corrupted with the aborted run a couple weeks ago, so I grabbed a fresh copy of the file and re-installed it in the APM/scripts directory on the SD card (I did it on the PC, then put the SD card back in the FC and did a power off/on). I’m getting frustrated and wondering if I am missing something simple? Further info: when I refresh params, it does so, then at the end, cycles among BARO1_GND_PRESS, COMPASS_DEV_ID and STAT_RUNTIME, which are read-only parameters that I cannot set. Only way to stop it is to cancel. I wonder if ardupilot is corrupted on my flight controller? I loaded a good param file from a saved file and wrote to the FC and still no joy.
Do you have any messages in Mission Planner’s messages screen regarding scripting errors?
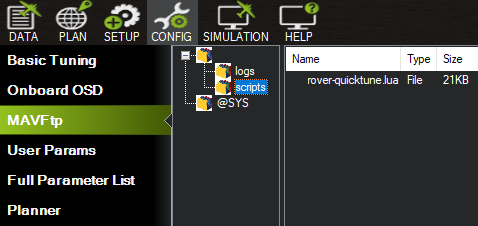
Are you certain the script is in the correct directory?
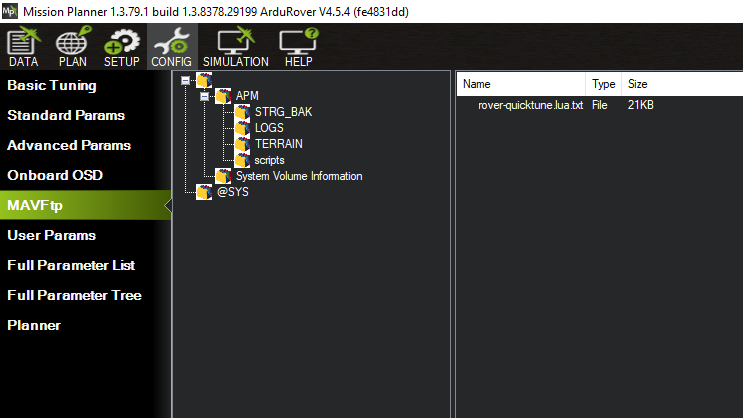
The following Config screen should look similar to this (likely with “APM” as the containing directory) if you drill down through the directory structure:
It’s highly unlikely that you have corrupt firmware if everything else is working.
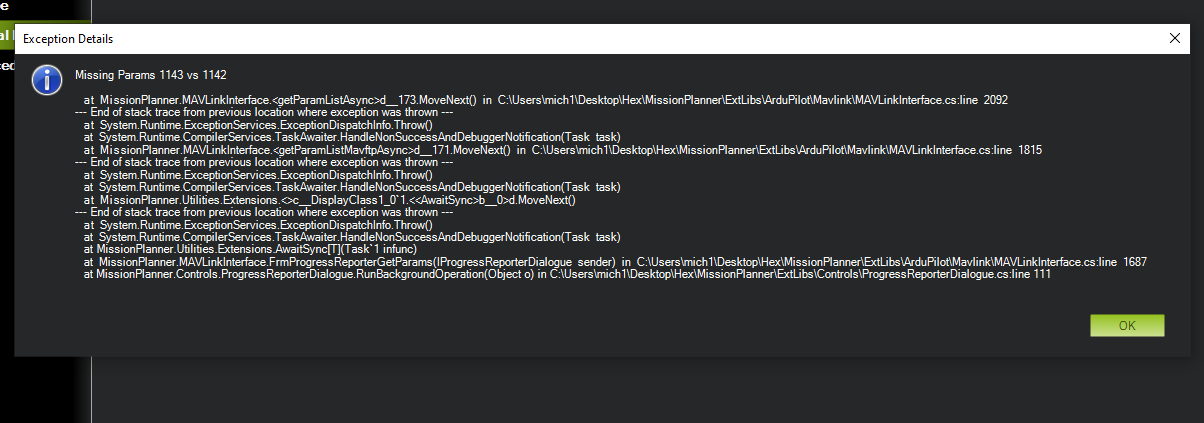
Again thanks for the response. Having someone on the other end of my inquiry is hugely important. I had no messages in the messages tab of Data. But when I first connected with the FC and pulled the param list, I got some weird messages regarding 1143 vs 1142 and attached a copy. The file structure on the sd card seems right. Its in “scripts”
It’s misnamed. Remove the “.txt” extension.
Errors look like a MP issue that might be one-off. Ignore it for now and report back if it’s repeatable.
Yuri, you are a magician as always. Thanks. Not sure how the txt got in there. Windows view normally hides extensions, so I need to remember to “view” extensions on the PC.
OK. Making slow progress. Got Quiktune started. Working on a circle of 2.5m and speed 0.8mps. In my backyard with a very slight slope, high on north and low on south. It is trying to tune and leaving messages. Varying speed from 1-7%, mostly 3-6%. Its been doing it for 15 minutes, describing perfect circles all the time. Is it supposed to do that?
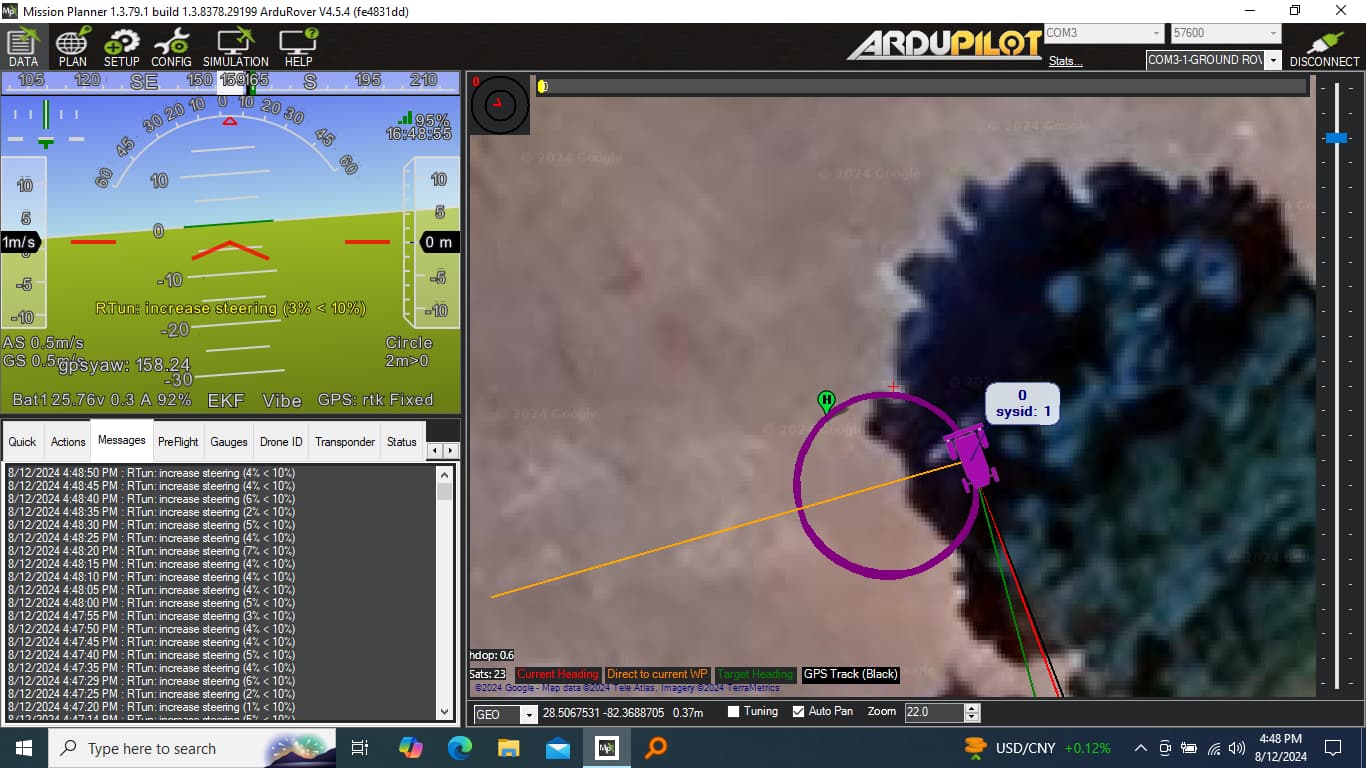
You need a faster speed or smaller circle.
OK. Is the slight slope a problem?
Nope. That message means it isn’t generating enough steering rate to tune. If you can find a flat spot, tune there - likely better results.
Thanks. I’ll try again tomorrow.
The 2m circle and high speed are too hard on my tank on the grass. Its thrown the track many times. Its oscillating strongly in the 2m circle until it throws a track. UPDATE: I moved the tank to the concrete driveway and set circle to 2m and circ_speed to 1mps and it tuned immediately.
Values I got are: ATC_SPEED_FLTD=ATC_SPEED_FLTT=0 hz, ATC_SPEED_FLTE = 10 hz, ATC_SPEED_I=ATC_SPEED_P=.2533461, ATC_STR_RAT_FF = 0.2149643, ATC_STR_RAT_FLTD 2 Hz, ATC_STR_RAT_FLTE 10hz, ATC_STR_RAT_FLTT 2hz, ATC_STR_RAT_I = ATC_STR_RAT_P= .1074822, ATC_STR_RAT_MAX 120 deg/sec
So, do these values look anywhere reasonable to those in the know? Yuri? You were right, as always, just had to speed up the rover and constrict the circle.
Wow. Huge progress. Once the tuning was completed, I set up a switch on transmitter for waypoint save and mapped the entire back yard. Yuri, what’s your best advice and/or video on how to get the rover to turn crisply and go in straight lines from one waypoint to another?
Post a log of a short auto mission where you make some 90 degree turns and some that are a bit less of an angle.
Usually the best plan of attack is to get the steering tuned as well as possible before bothering with any navigation tuning parameters. And as always, follow the documentation to a tee. Rover’s tuning section has been recently updated and is excellent as long as you follow it closely (there are several pages in order).