Pondering the build of a VTOL and started to wonder.
Do I need a pitot. I ask because a VTOL with a puller config would possibly have the pitot being blown on from the prop and that might not be a good thing. So thought I would ask.
1 Like
Hi Ricky,
with a Pusher VTOL, it is best to mount the Pitot tube on the outside of a wing.

VTOL without airspeed sensor is possible, but I have little and no good experience with it: I had flown the small Z84 quad in the picture first without airspeed sensor a few times, but then installed one, because with a little more wind the first transition after the VTOL start by still very inaccurate airspeedestimation (which at the beginning rather corresponds to the groundspeed) goes easily wrong. My not very fast Z84 did not complete the transition against heavy wind, in wind direction I have not tried of course. Even if it is more effort, I recommend the airspeed sensor on the VTOL. After takeoff you can fly off in all directions, even in wind direction. Q_ASSIST works more accurately in any case. Correctly set, in- and outboundtransitions work without loss of altitude, so that you can switch between airplane and hover at lowest altitude.
Rolf
1 Like
Hi thanks for that I have just fitted a Air Speed sensor on my Heewing VTOL still to calibrate it next thing after plane tuneing,may I ask for a rough guide as to what to set air speed assistance please
Hey Rolf.
As always I appreciate your input. I will take your advice and see about the Pitot being on the wing.
Cheers
Marty nice to see your still in the game.
thanks guys.
1 Like
Hi Richard,hopeyou and family are all well.yea im just pottering about trying to keep old age at bay
VTOL speed settings should be clear:
Before the first flight set ARSPD_FBW_MIN to stallspeed + a safety margin, e.g. 10 m/s + 20% = 12 m/s.
Set Q_ASSIST_SPEED lower than ARSPD_FBW_MIN , but not lower than stallspeed. So in the above example e.g. 10,5 m/s
I always set Q_ASSIST_DELAY to 0, so that in case of triggering Q_ASSIST starts immediately and not delayed.
Q_ASSIST_ANGEL is the angle between desired and actual BANK ANGLE, at which Q_ASSIST is also activated.
I have selected 30° there. If you choose a smaller angle, you will have more “false alarms” during wind gusts if you set Q_ASSIST_DELAY to 0.
ARSPD_FBW_MIN is the transitionspeed, in which the motors that cannot be tilt are switched on or off. With the outbound transition, the switch-off proceeds gradually over a preset period of 5000 microseconds (Q_TRANSITION_MS 5000). I personally find the period of long 5 seconds too long with correctly parameterized ARSPD_FBW_MIN. I have there 0 or 500 milliseconds. For the first flight I would set 2000.
ARSPD_FBW_MAX is set to the maximum speed in level flight at full throttle. TRIM_ARSPD_CM is set to the intended cruise speed (in cm/s !) at which the aircraft should fly in autothrottle modes. TRIM_THROTTLE is the throttle setting in percent necessary for this speed. SCALING_SPEED should be set to the speed at which you fly autotune.
About the airspeed sensor itself:
The first “Maiden” VTOL transition to FBWA mode is done with as little wind as possible, so that the airspeed sensor can be deactivated during the first flight (ARSPD_USE 0). If the VTOL then flies reasonably in FBWA, I immediately do autotune. I fly patterns aligned with the wind direction or loiter circles. The correct value of ARSPD_RATIO can then be determined from the GPS speed and airspeed in the log file.
See Calibrating an Airspeed Sensor — Plane documentation. Or you let it do it automatically: RCx_OPTION 91, Airspeed Ratio Calibration.
When connecting the battery, the pitot tube must be protected from the wind for approx. 30-45 seconds so that the calibration of the zero point (ARSPD_OFFSET) takes place correctly. This applies to all airspeed sensors except the SDP33, which operates on a thermal principle and therefore does not require a zero point calibration(Set ARSPD_SKIP_CAL to 1).
Rolf
1 Like
Thank you Rolf, this is amazing advice,thank you from the bottom of my heart, have a great day.
Hey Rolf.
Hope all is well with you and yours.
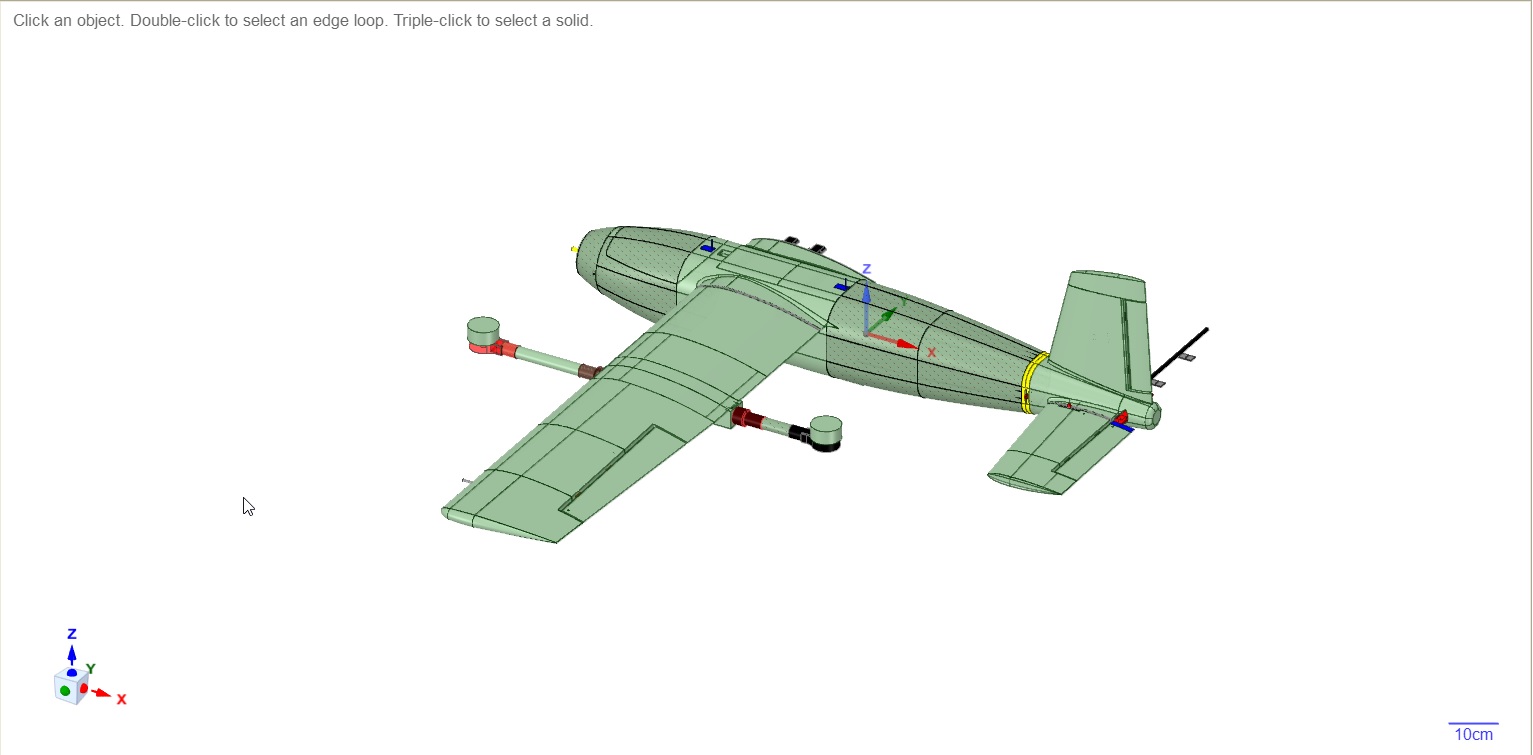
I notice that in your photo you have what I think is the MakeFlyeasy fighter. If I am correct can you tell me if there is an fpv camera on board and if so where. Just curious how it was located.
Thanks again for the Pitot information.
1 Like
Hello Ricky,
yes, it is the MFE Fighter. I have yet to install FPV cameras. I would like to install a split cam with HD recording on top of the vertical stabilizer. This would give a good view of the entire aircraft from the top rear.
Rolf
Hey Rolf thanks for teh response.
I assume from what you say that there is no official FPV camera installation then. When i look at the frame I keep thinking that any camera on the body would look through the prop which isn’t ideal.
As for on the tail would you not have to add an additional connector for the camera.
The aircraft is certainly designed for aerial photography and not for FPV. But it just occurred to me that you could also mount a small camera in front of one of the two front engines on the engine boom. The extra cables to the rear would not be a problem. Normally there are only 3 servos via a 9-pin sub-D connection. CAN bus +,-, GND, +5 volts, + servo, VideoOut are only 6 pins.
Hey Rolf
You have that MFE Fighter.
Can you tell me how much it weighs…dry…no battery or payload.
I am curious as I have this on my bench right now. It’s 3d printed.



Hi Ricky,
Interesting and challenging project. Hopefully it won’t be too heavy.
Here are the weights of mine:
Ready to fly, but without batteries or payload:
5.79 kg (12lb 12oz)
thereof fuselage with tail:
2.25kg (4lb 15oz)
One wing with quad motors:
1.77kg (3lb 14oz)
Thats awesome Rolf thank you very much.
I best get out my scale now.
So I know that this isn’t the same dimensions as the Fighter. I think its thicker in the body.
But I think regardless I need to trim down some weight on the version 2 model.
Your fuselage with tail is 2.25kg (4lb 15oz)
Mind is coming in at 3.1, so higher then the Fighter. Something I will need to look into.
That said I don’t know what size pull motor you have so it may not be an accurate comparison. But I thought it would be a good idea to see how closely matched they are.
Also mine is scaled for 18 inch props, not sure what size are on the fighter. I think they are CF 20x6.8.
I am only in the middle of wing construction so I have nothing to compare there.
Cheers

Small update for today
@Rolf
I am hoping you can answer a question for me.
Oh and I took the information you provided about weights and went back and did a number of design changes to further reduce the weight to get it closer to the weights you expressed.
So here is my question, if you don’t get a chance to answer it that’s cool. Just taking a shot.
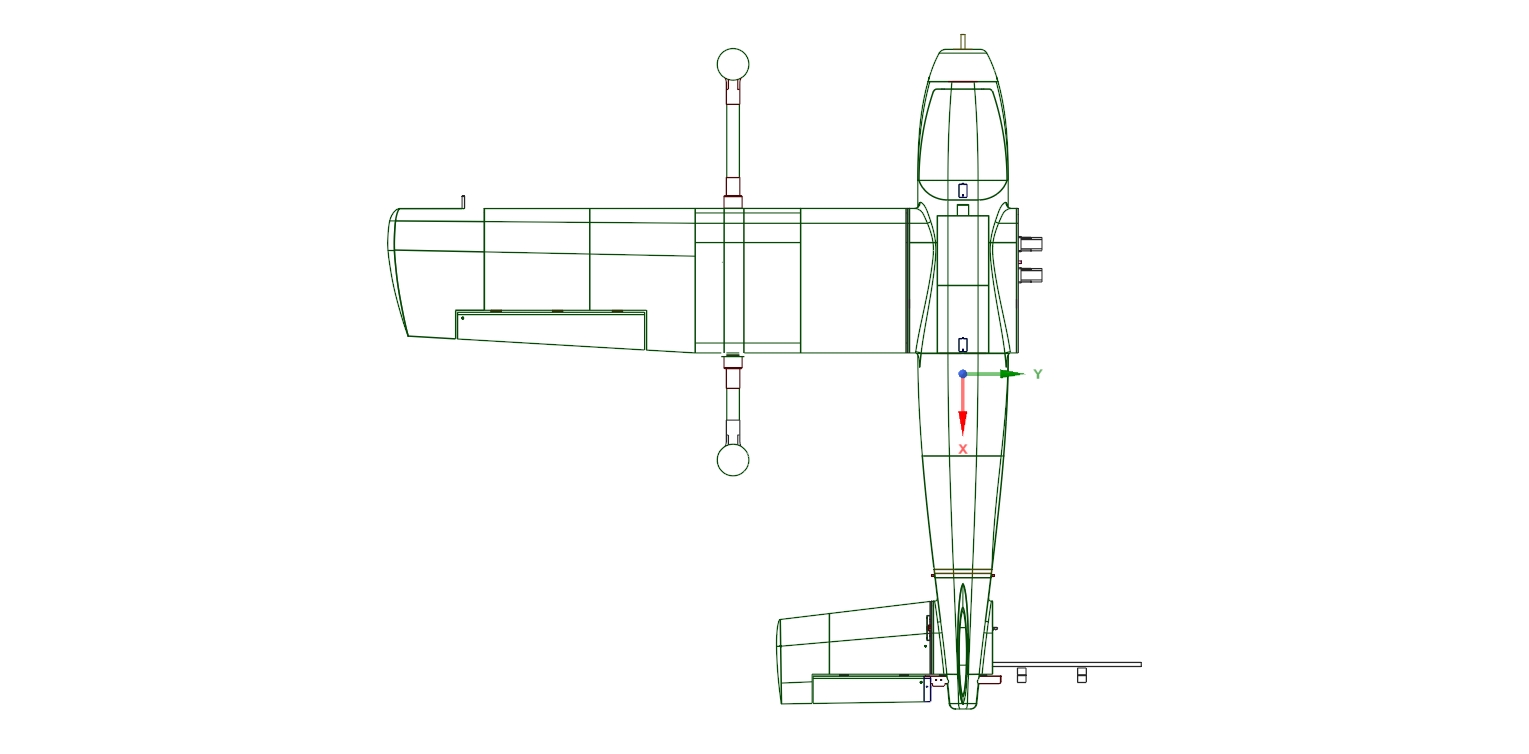
It’s about the wing. I am curious if it tapers constantly from wing root to tip or if it remains constant till past the booms then tapers. Also if it does taper any idea of the approximate thickness at the wings end.
I am trying to work the wing design and keep stumbling.
Anyway I appreciate any information you can provide. Cheers and be safe.
Hi Ricky,
I consider your project very exciting. The wings of the MFE Fighter taper behind the beams. I’ll measure the thickness yet. But for the wings, I wouldn’t try to replicate the MFE wings at all, since you are completely free with 3D printing to choose the wing profile, wing size, etc. to fit your goals.
Cheers
Rolf
Hey Thanks Rolf
I guess the problem I am up against is I don’t know enough about wing design to be confident in the design.
I am pleased you think the project is exciting, I too think so. I have the body and tail now built and need to wire it up but want to get to a point where I am feeling good about the wing. I printed the tip yesterday and thought it was too thick so this is why I asked the question.
@Rolf
Finally landed on the end wing design, or at least for this version. It may change as I learn more about it in the future. I know I need to narrow up the rear section of the fuselage, it’s a bit thinner on the real Fighter.
Started the wiring today. I think in the next week or so it will be done and then it’s just config and testing. Do you know where I could get a copy of a fighter Param file. I am thinking that it would be a good place to start. I get that there will be differences in compass and radio…that sort of thing but I am thinking the basic config would at least be done.
Let me know what you think if you can.
cheers
Hi @rickyg32
Here is the link of MFE docs.
You can find it here.
Congratulation for your hard work
Cheers
Hey thanks Tony.
Really appreciate it. Have a super Christmas.