Hi.
i was trying to turn a biquad filter2p into a third-order filter,here is my work.
-
i modify the code in LowPassFilter2p.cpp.
-
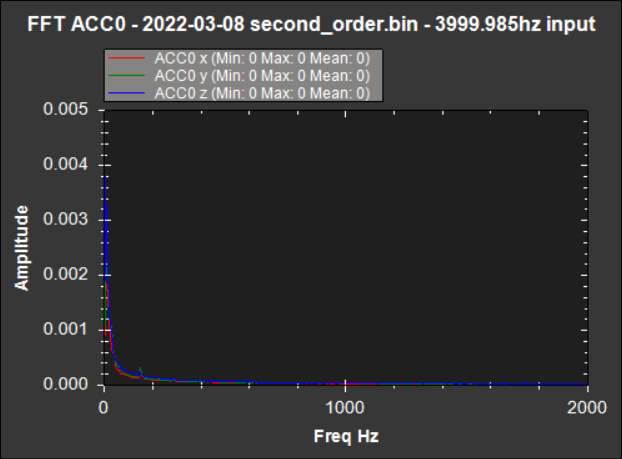
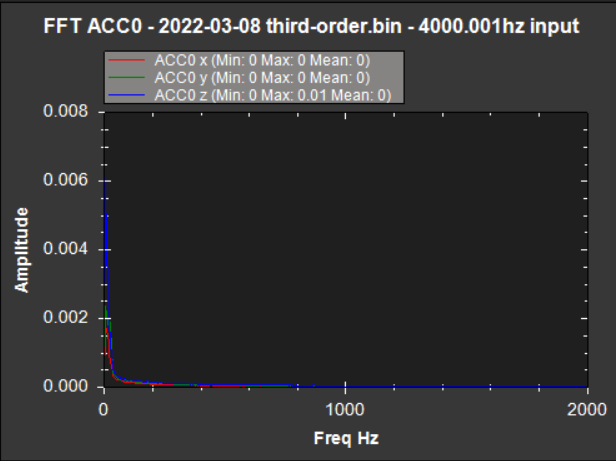
i set INS_GYRO_FILTER=20 and test on biquad filter(original) and third-order filter in SITL with same fly mission.
when using biquad filter , the vehicle runs stably, on third-order filter, it runs unsteadily,gyro has a lot of noise . -
i set INS_GYRO_FILTER=40,both code version run stably
i want to know why it work so differently? does it have somethings to do with autotune after i change the filter setting?
40hz experiment fft data are as follows.