Hi,
From the ArduPlane manual I understand the RLL2SRV_TCONST is the time constant of rolling motion. Current default value is 0.45 and the lower limit is 0.40.
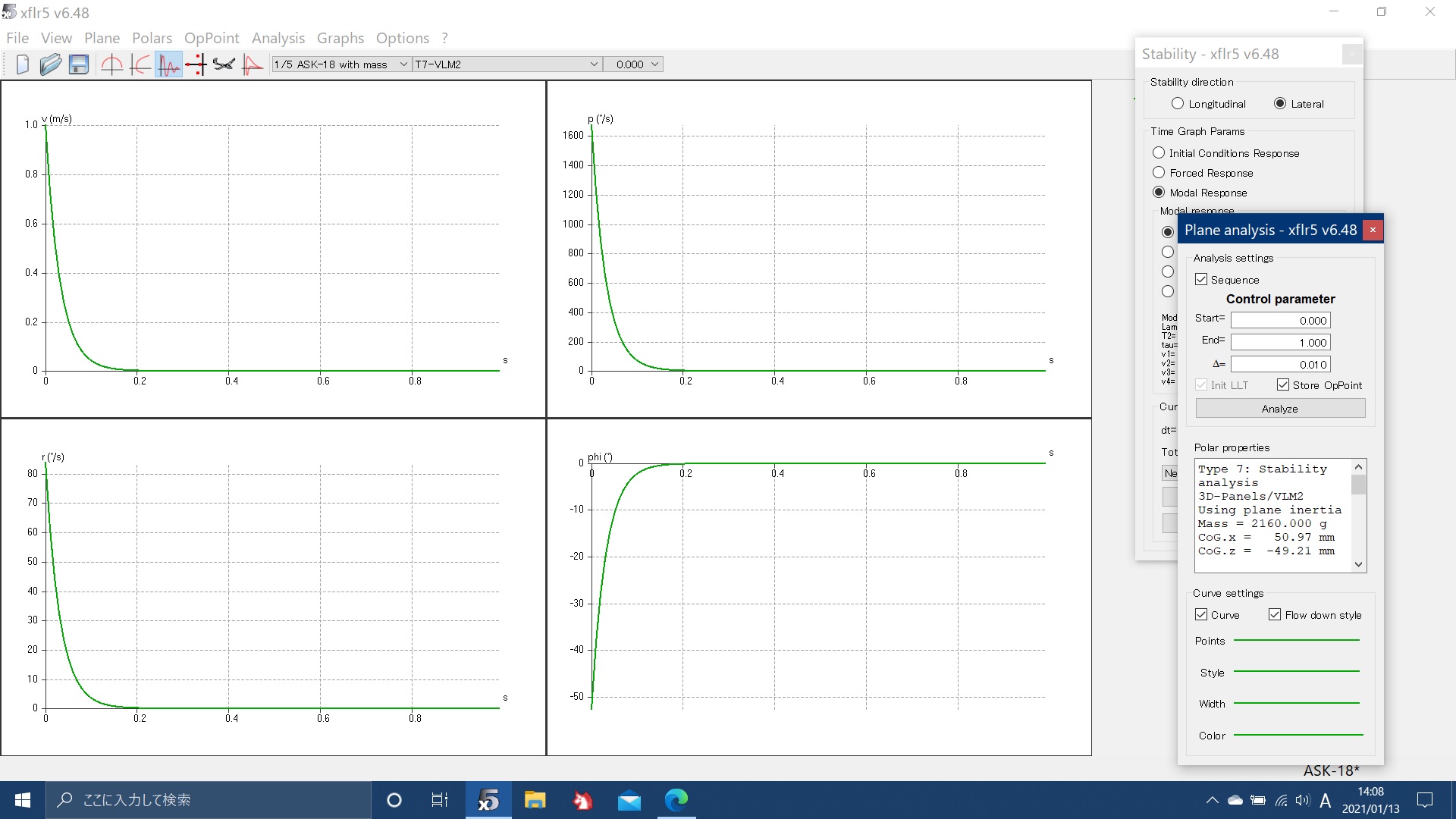
I conducted my glider’s stability analysis using the XFLR5 and found its rolling subsidence as below.
From this graph you can understand this glider’s rolling time constant is below 0.2 sec. I know that RLL2SRV_TCONST is composed from two, one is aircraft itself and the other is the servo.
It is somewhat difficult to get the servo’s time constant, but my glider’s airelon servos have response of 0.15sec for 60deg rotation. From this data I assume my servo’s time constant is well below 0.15sec.
Combining avobe two, I believe my glider’s rolling time constant is well below 0.35sec.
My glider has 3.2m wing span and weighs around 2Kg.
From these data I think most model aircraft has much smaller rolling time constant than that is assumed by the ArduPlane default value.
Any comments are welcomed.
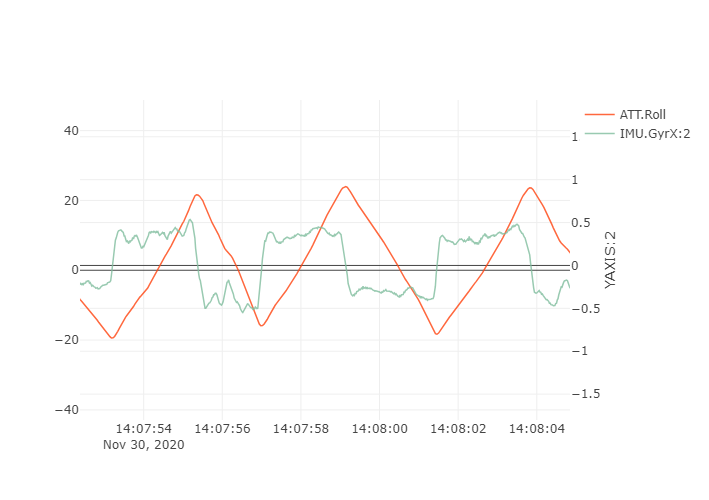
I checked a flight log data of this aircraft. The data were logged for an autotune flight where airelons were moved full range several times.
This is the data.
You can sea the periodic oscilation of roll angle and roll rate(GyrX).
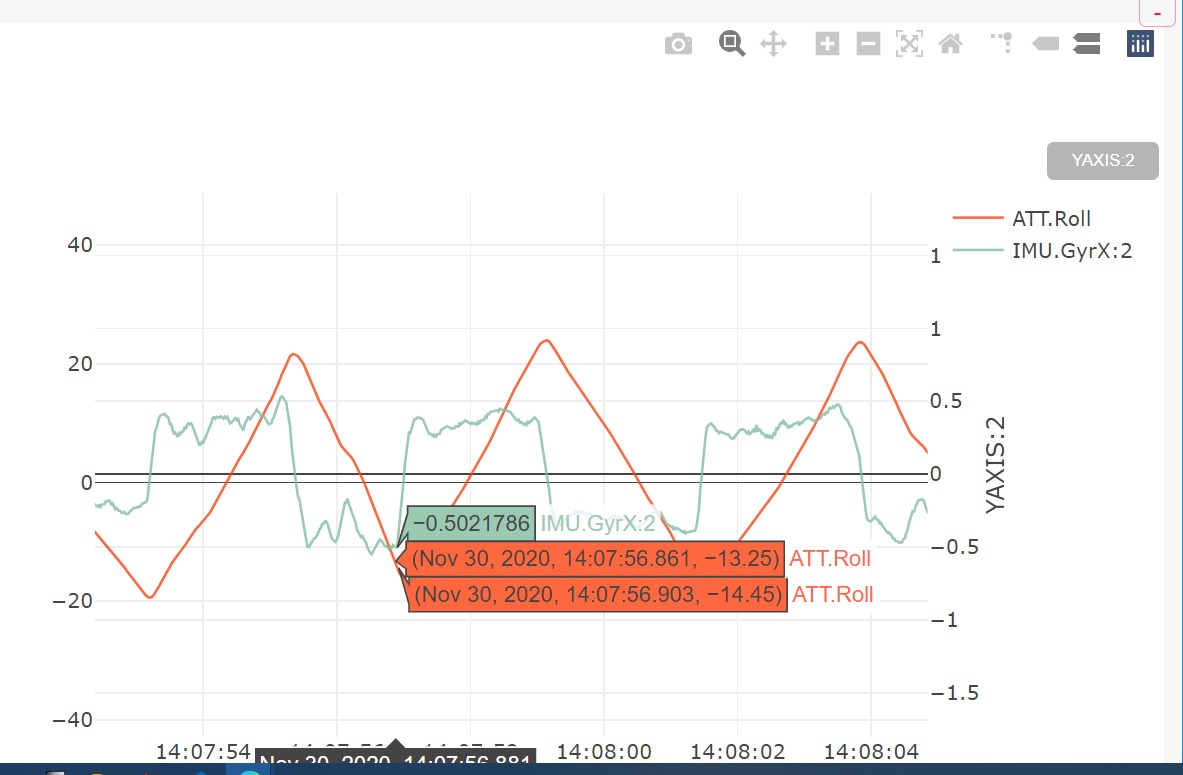
Let’s measure the roll rate time constant from this data.
Start time is 14:07:56.903
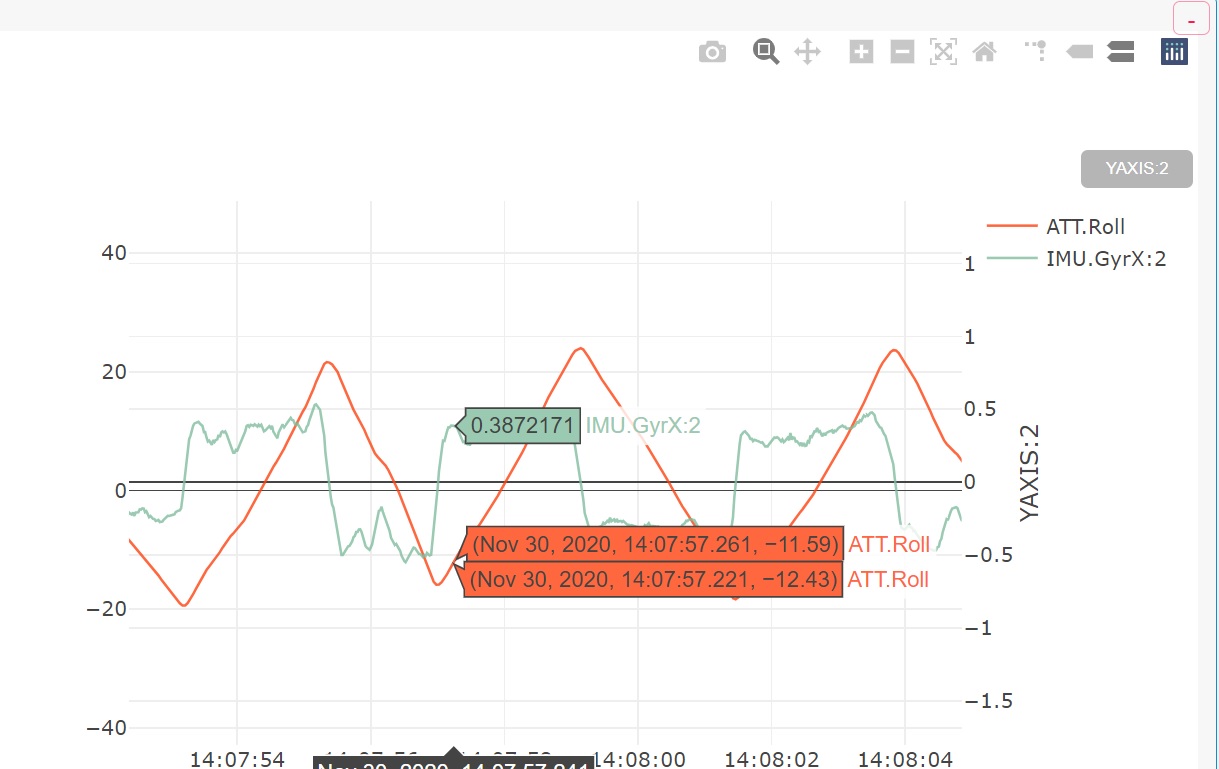
The time difference is 0.318sec.
I measured from the bottom to the max, so this time difference is not the roll time constant. The time constant should be around 63% of this time difference.
Anyway it seems clear for me the ArduPlane’s RLL2SRV_TCONST is too big for standard model airplanes.
How do you think?
Nice investigation. The parameter affects the closed-loop response time constant that the autopilot will try to achieve. It doesn’t need to be the same as the open-loop time constant, but of course it does need to be slower. The defaults are likely selected to give a smoother response.
Even though the parameter has a minimum of 0.4, this is simply the recommended range. Usually the GCS will let you set a smaller value with a warning, if you feel that it will improve the handling.
Hi Samuel_Tabor,
Thank you for your quick and kind response.
Now I understand the reason of a smoother response.
I will try to to set a smaller value and test the change of the response.