Hello everyone.
Recently,I started to use optical flow on my quadrotor aircraft.I have some doubts.
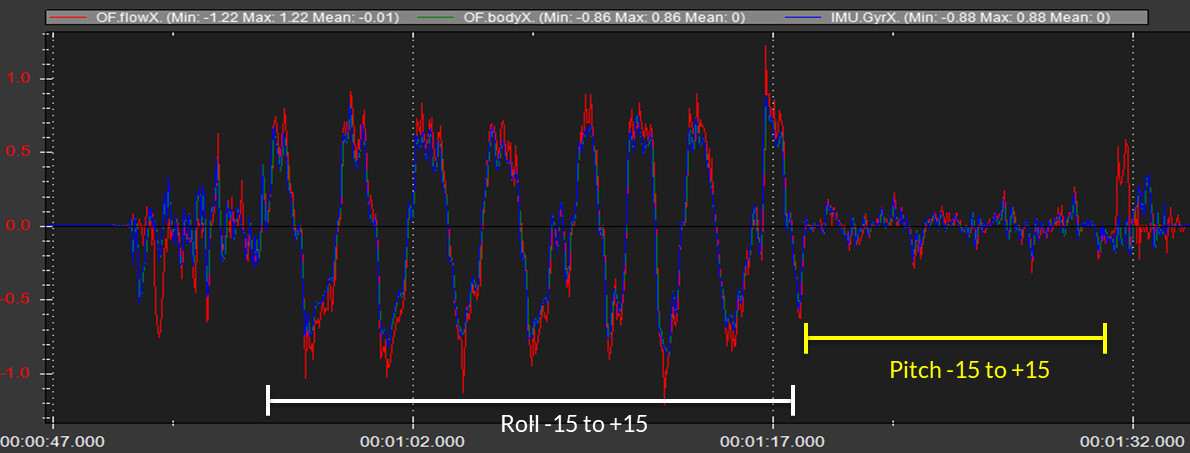
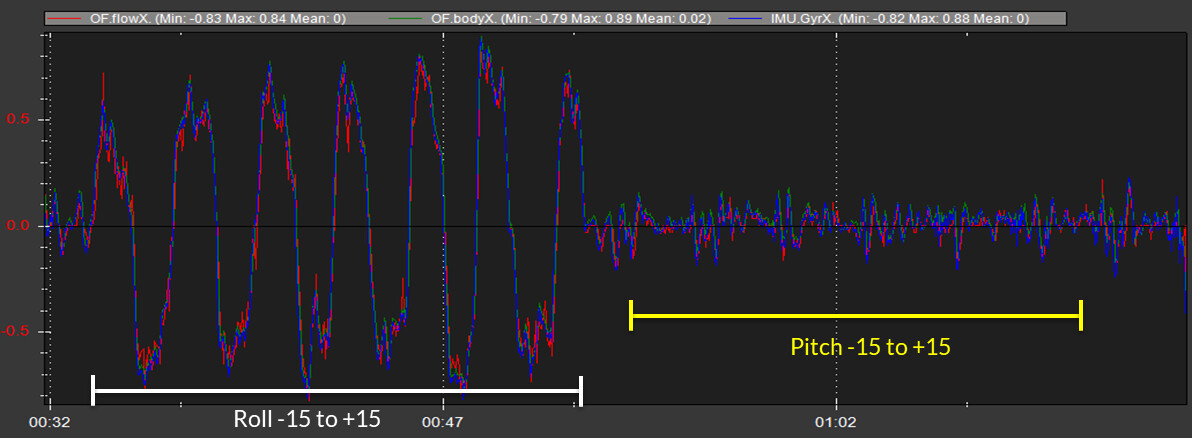
(1) What is different between “OF.body” and “OF.flow”?
I have been calibrated following Optical Flow Sensor Testing and Setup — Copter documentation. That looks acceptable(I don’t sure).
I want to know in detail what is “OF.body” means. I saw the description just “derived velocity, X-axis”.
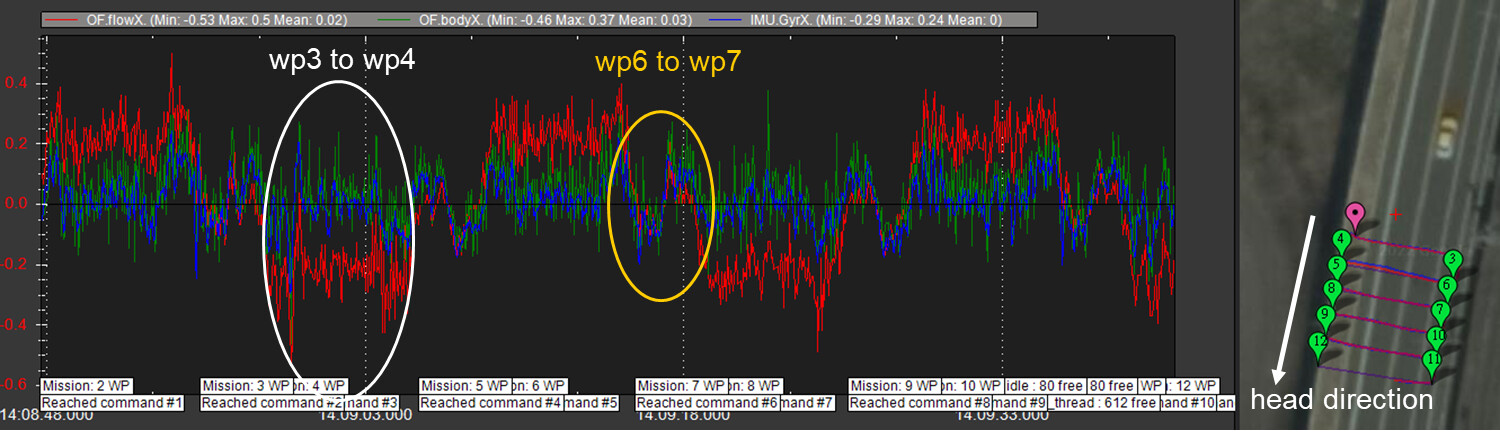
Fig2. Fly in outdoors.
In the yellow circle ,it same with Fig1.(a) result.
But in the white circle ,“OF.flow’ and 'OF.body” isn’t matched.
Is this normal?
Using sensor: HereFlow.
Bin file(sorry that bigger than 4.4MB):
update_1: I forgot say I use radar to getting ground distance.
OF.body comes from the sensor IMU.
OF.flow is the actual OpticalFlow signal
So we match the sensor IMU with the FC IMU on corresponding axes and we adjust OF gain and delay to match velocity signals.
I dont think that HereFlow is designed for outdoor use as the embedded Lidar is a short range low power indoor led.
If you’re using 4.2 then I highly recommend using the inflight flow calibration instead of the older manual method involving logs. It does require though that the vehicle have a GPS attached and a lidar with a range of at least 4 or 5 meters.
Sorry , I forgot to say that my drone has used radar to get ground distance.
But I am not sure the radar’s style. (The drone was not with here for these few days)
Could you kindly advise point (2) what is the different between Fig.2 and Fig1.(a)?