Hello all,
I’m hoping someone can help me figure out why Ardupilot would send throttle to Zero during a quadplane’s waypoint mission. I had flown the plane changing modes manually from QStabilize to FBWA and back with no problem, and the plane behaved well. I have done an autotune, and I have an airspeed sensor that I had just calibrated a flight or two before the incident.
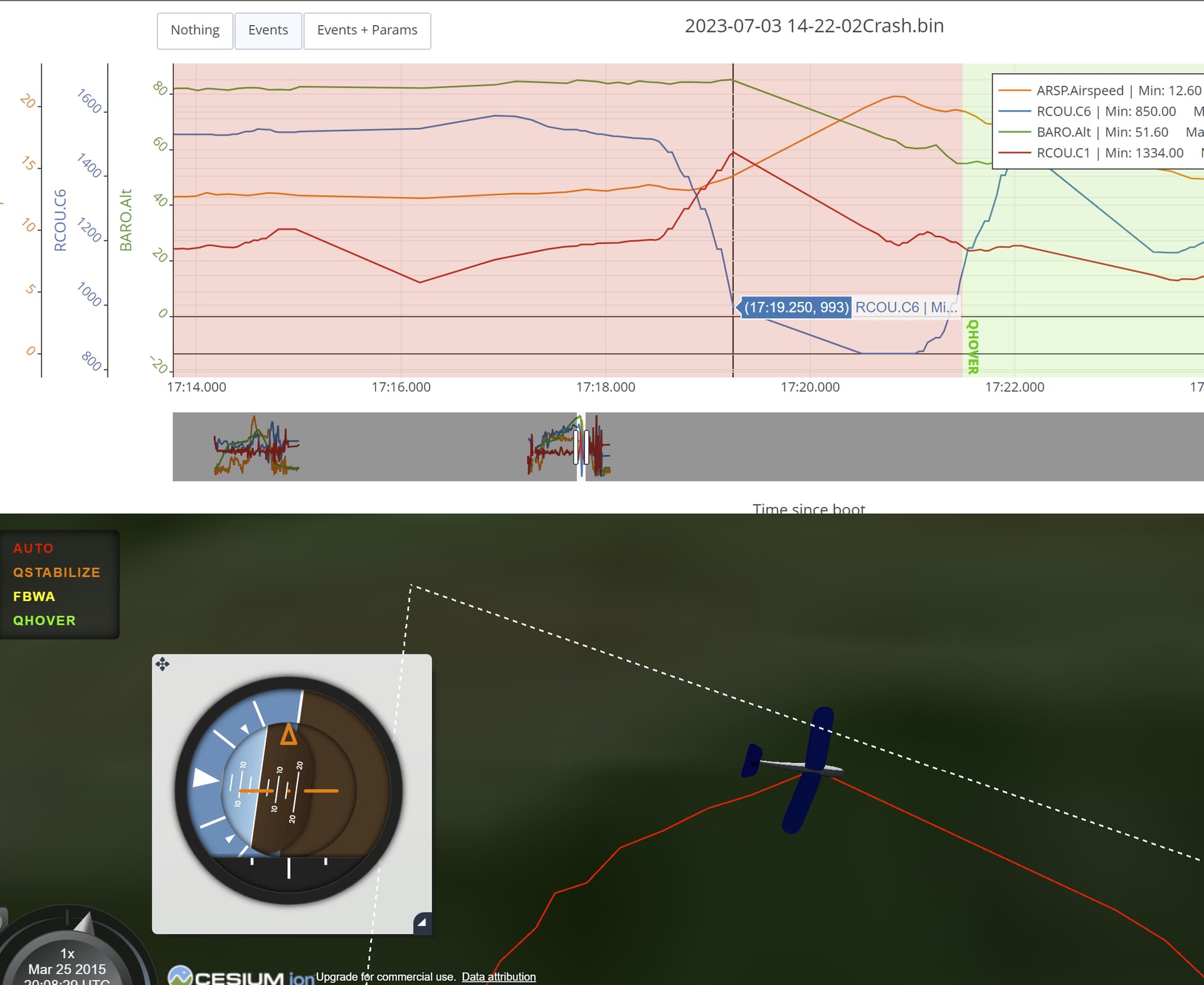
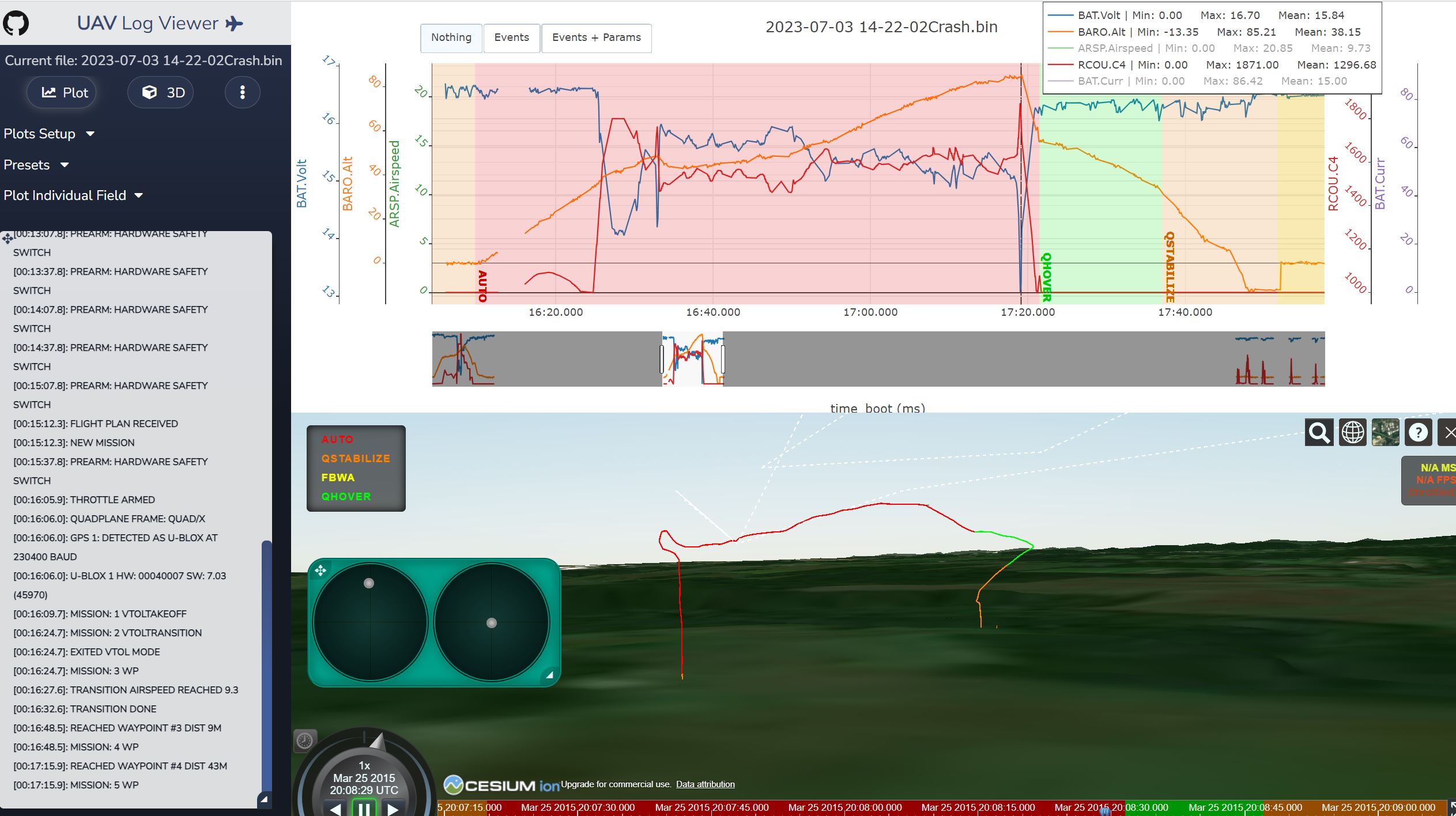
Basically, I wanted to get auto missions working and created the attached mission with just a few waypoints and VTOL takeoff and land. It looked like things were going well with a good takeoff and smooth transition, but when going for waypoint 5, Ardupilot decided to send throttle to zero while in FBWA and the plane started to dive hard. I was able to transition to q-hover/q-stabilize, trying to recover, but the plane kept losing altitude despite my efforts to keep it in the air and get the plane to a safe landing.
I am attaching the log file (Link to the file) and a picture of the UAV Log Viewer showing the interesting bit. What I can see is that the plane raised the throttle to maintain altitude in the turn, the voltage sagged but then Ardupilot quickly dropped the throttle to just about 0%
I have been looking for a reason why this happened, but can someone help me out here? Thanks!
Here is the log file:
https://drive.google.com/drive/folders/15ULDYdMT6AeDNMqF6EGnkgesMvMxSk2i?usp=sharing
This is what it looks like after the incident…