We are testing a quadplane but it keeps failing to make a full transition into fixed wing mode.
It was pre-tested by a supplier.
Its quad mode is fine and Q_hovering quite stable without much wind.
Whenever we set up a mission which included auto launching, it turns into Land mode by itself with a message ‘Failed to complete takeoff, excessive wind’
After several trial and failure of auto launching, we decided to start a mission after launching at a high altitude. When our VTOL reached certain altitude, we changed flight mode to FBW-A to increase speed before initiating mission uploaded. Arspd went up to around 17m/s with a full throttle, which was limited to 90%. Speed didn’t go up any higher than that at the time and there was a bit of tail wind.
After 10 seconds into mission flight, an error message ‘Transition failed, exceeded time limit.’ popped up and she began to RTL.
Q_trans_fail was set at 20 but it didn’t work as I expected. Also, if I remember correctly, we tried to activate one of the Q_options bit (19) which will force the VTOL to complete transition ignoring time limit (if I understood the option properly) but it didn’t work either.
Yes, I just checked in the log that it never reached 18m/s for 20s.
By the way, we pushed our Throttle to the fullest before trying transition but it still failed. I know there was a bit of tail wind but it was not that strong in my opinion.
How can we reach the speed? Can we put the max throttle to 95~100%? I think lowering min speed down to around 16 might not safe.
@nerakai
There are some contradictions between parameter settings, log file data and what you report. It is first necessary to clarify some causes before getting lost in details:
If you believe the log datas and the correctness of the parameter settings, the slight tailwind was 10 m/s.
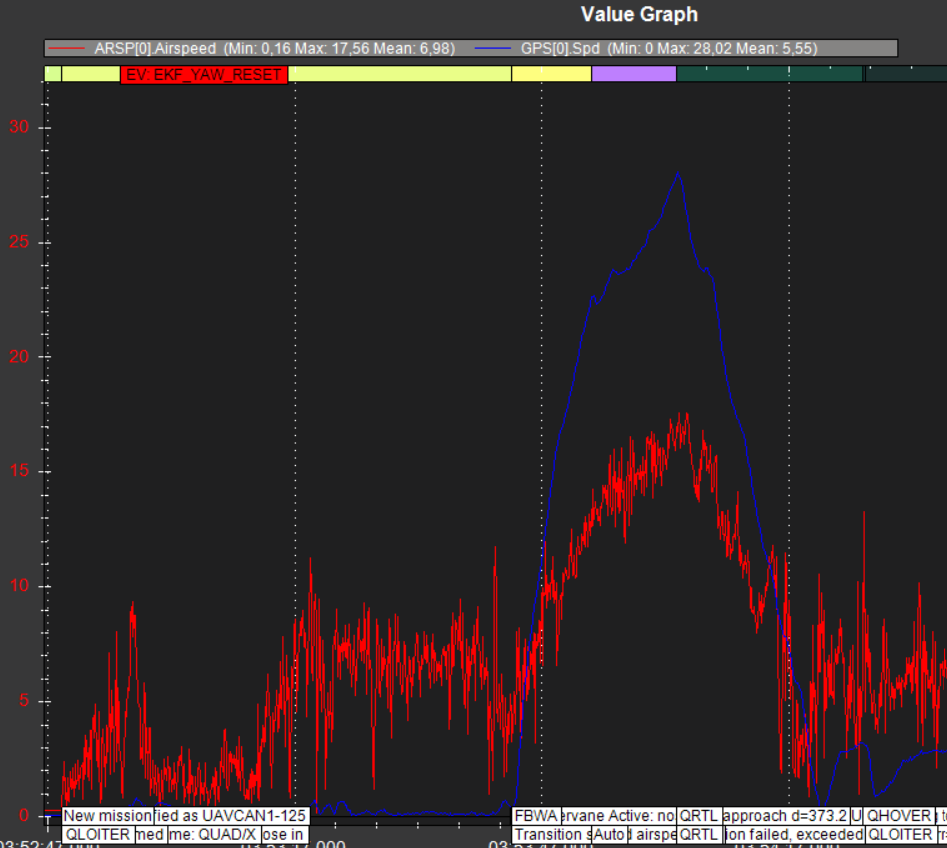
Here is the recording of the groundspeed (red) and airspeed (blue) during the FBWA transition attempt:
But no matter how high the tailwind component is, it should not have influenced the transition, because the airspeed sensor was activated and only the airspeed, not the groundspeed, is decisive for the completion of the transition.
So there remain three types of possibilities:
a) The flight performance (airspeed) expected by many parameters is not even approached by the aircraft.
b) The airspeed sensor measures completely wrong, because you did not cover it correctly during initialisation or the dynamic pressure opening is partially blocked.
c) The airspeed sensor measures completely wrong because the calibration or the installation location is wrong.
I would complain about the failure to the supplier.
I understand arspd is the decisive component for transition completion.
I think we did the pre-flight calibration properly. Yes, tailwind was not that strong on the ground, I felt it like 4m/s at that time, but it could have been much different up 80m above. We are going to check any possible blockage in the sensor. It is installed on the very front tip of the VTOL as usual.
What worries me greatly is, thanks to lack of enough knowledge and experience in VTOL, this aircraft is not capable in this wind condition which was quite normal for us.
If the tailwind is the very decisive factor for all the aircraft, should we only operate the airplane in the very low wind condition or try to launch (start transition) into the wind?
Let’s say it somehow succssfully completed a transition but hit by a tailwind in the middle of mission flight. Would it fail to maintain its MIN arspd and transform back into pre-determined FS mode?
Is there a certain requirement for performance of push motor to operate an aircraft in the high wind? Do we need stronger motor to operate, to maintain fixed-wing mode, in the wind? or average motor can keep up with the external airspeed change?
I believed until now that it still will apply thrust on the incoming tailwind and can maintain its flight as long as the push motor works as in the normal wind condition. (or Does it have to spin faster?)
Sorry that I had overlooked this the first time:
The specific reason that the transition was aborted is “Transition failed, exceeded time limit”.
This is because Q_TRANS_FAIL is set to 20 and Q_TRANS_FAIL_ACT is set to 1 . The latter means that if the transition is not completed after the time set in Q_TRANS_FAIL has elapsed, the system switches to QRTL mode. Be glad that Q_TRANS_FAIL_ACT was not set to 0, then it would have landed in the water.
Yea, I learned from the flight that the Q_TRANS_FAIL time started from the moment fligth mode was changed into FBWA not auto.
We also knew it might be safer to have the fail_act as QRTL rather than Qland as we are flying it over the water.
Q_trans_fail parameter was modified to 0 afterward but test has not carried out yet. We wish the VTOL we are testing can be operated in the wind like that because it’s quite normal for maritime operation environment.
Now, we’re trying to figure out how to solve the ‘Failed to complete takeoff, excessive wind’ error. Do we need to focus on hardware or is there any parameter related to arspd sensor? We replaced first sensor into CUAV one and after pre-flight calibration arspd registerd in the status is quite stable between 1~3m/s. Still, same behavior happened when VTOL reached transition altitude.
I have deactivated airspeed sensors error detection by difference between ground- and airspeed. Even if I appreciate Arduplane very much, I personally think in this case this kind of error detection is unsuitable, especially for larger model airplanes.
According to your logfile you have set 12 m/s (ARSPD_WIND_MAX, AHRS_WIND_MAX ).
It is clear that in a windy environment this can lead to the sensor being incorrectly identified as faulty, even though it is intact and the aircraft has no problems flying at that wind speed.