Hello,
When flying FW mode in an “AUTO” mission, my quadplane (Pixhawk, ArduPlane V3.8.0beta5) established an equilibrium condition with VTOL motors on, Pitch: -5deg and FW motor: %100 thr. The aircraft flew in this condition more than a minute and landed by “RTL” successfully.
Logs: https://we.tl/R0Tx2aIWwk
Parameters: 26_2017-07-18 11-17-57_VTOL_FW_LocalMinima.log.param (16.1 KB)
Critical parameters are ARSPD_FBW_MIN = 9 m/s, Q_ASSIST_SPEED = 9.5 m/s, TRIM_ARSPD_CM = 1200 cm/s, ARSPD_FBW_MAX = 15 m/s and Q_TRANS_PIT_MAX = 5 deg.
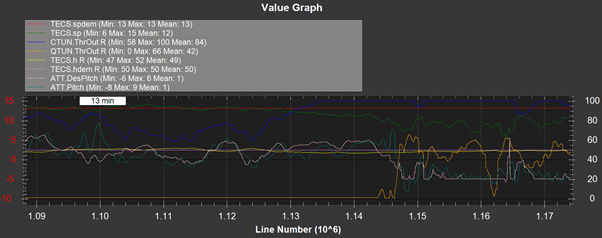
DataFlash logs show that autopilot applied full FW THR in order to increase airspeed and pitch up in order reach altitude. Since my FW motor is not high KV, airspeed could not be held, VTOL motors powered on below Q_ASSIST_SPEED which caused the aircraft pitch down to -5deg. At this conditions an equilibrium conditions is achieved with FW motor at full throttle to reach airspeed, wings provide downward force due to negative pitch, and VTOL motors on to compensate this force and weight of the aircraft. This condition consumes too much power as expected.
I believe that using a more powerful (high KV) motor would solve the problem if I had more weight margin. Do you think that increasing Q_TRANS_PIT_MAX would allow more pitch down, increase airspeed, close VTOL motors and continue by pitching up as sole FW?
Any other opinion?
Best Wishes,
Ferit.