I am trying to slow down my quadplane transition because I am towing a sensor and it needs time to “follow” the aircraft. I am using an orange cube and ArduPlane v4.0.9. I have tried multiple different parameters but can’t get the transition to slow down. Q_TANSITION_MS, THR_SLEW & TKOFF_THR_SLEW are the main parameters that I have been concentrating on. Even with THR_SLEW at 30 (30% throttle per second) It still ramps up to THR_MAX within around 1.5 seconds. Any help would be greatly appreciated.
Kind Regards,
Perry
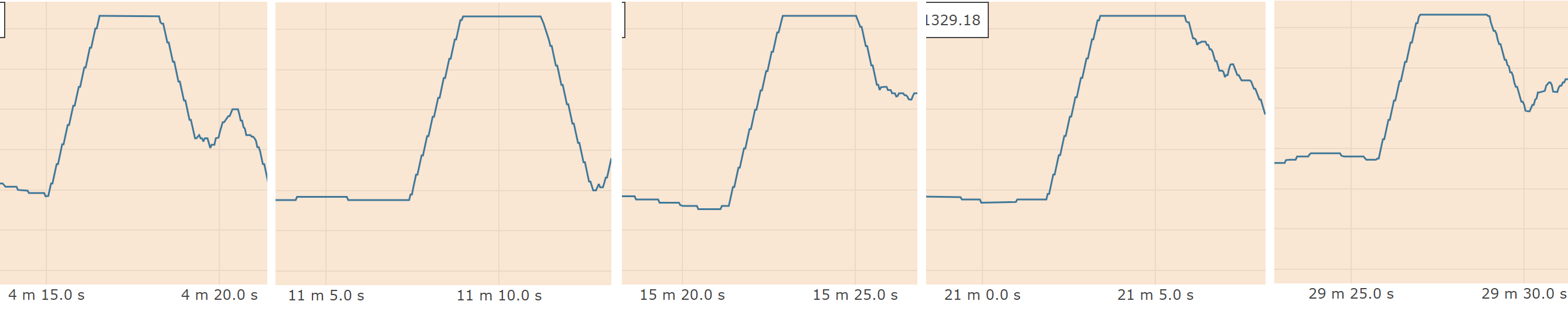
These graphs above are of the RCOUT_CH3 (SERVO3) for the throttle during the transition. The gradient is all the same as far as I can see but I expected them to change when changing throttle slew rates. The first graph is THR_SLEW at 50 then the subsequent ones are at 30 while changing other parameters.
Kind Regards,
Perry
@Hawk_Airborne unfortunately the throttle slew limit is done with integer maths, and to ensure progress is made it is at least 1us per loop, which means 300us/second for a quadplane with SCHED_LOOP_RATE=300.
As your SERVO3_MIN and MAX are 1100 and 1900, that means 100*300/800 percentage per second, which is 37.5 percent. So any THR_SLEW_RATE below 38 will give 37.5%, which is clearly not enough for your setup. @iampete has a PR that converts the library to float which has the potential to fix this:
note that you could fix this in 4.1.x with a lua script. You’d change SERVO3_FUNCTION to 94 (SCRIPTING1), and make a small lua script that copies the throttle output to function 94 with an extra slew limit applied