I’m trying to calibrate my transition and find good values for ARSPD_FBW_MIN and Q_TRANSITION_MS.
This is a flying wing so it is rather unstable and also the VTOL motors etc. add quite a bit of weight. No landing gear. So trying to figure out its stall characteristics is a bit of work. I used eCalc to get a rough estimate, a super conservative stall speed is around 60km/h (seems high, but better be safe). So for now I set my ASPD_FWD_MIN to 17 (m/s) until I’m sure the wing does indeed provide enough lift.
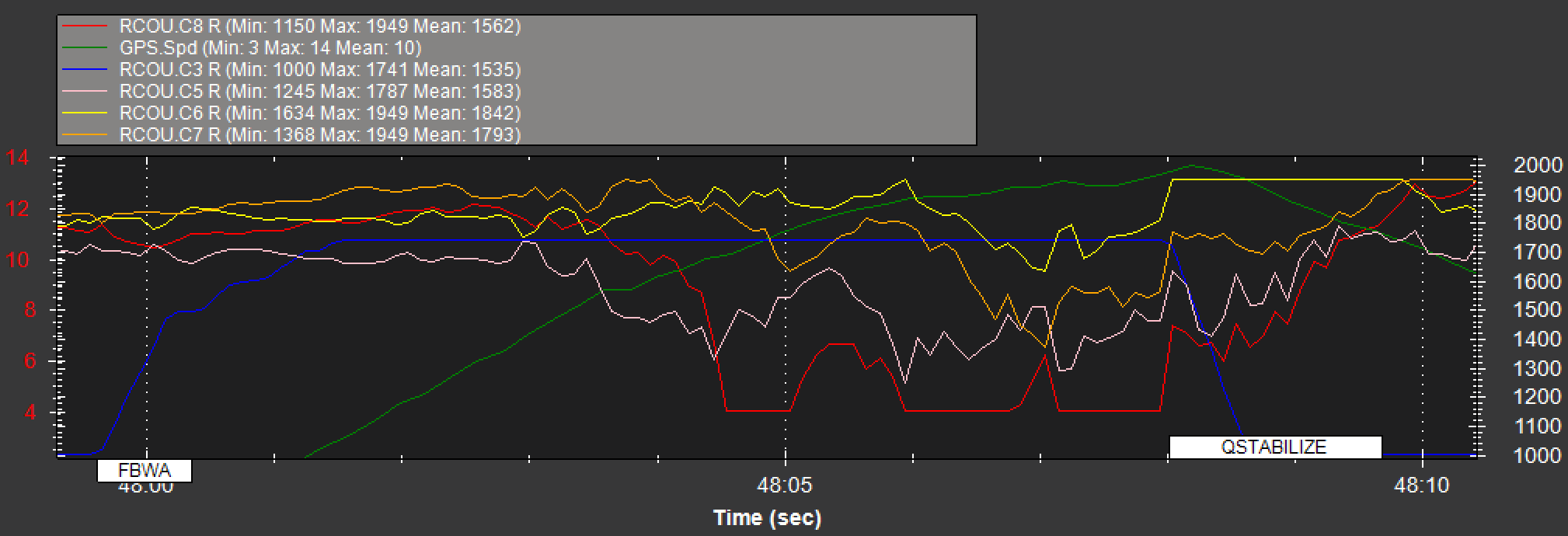
My idea is to accelerate the plane and see if the quad motors slow down while keeping constant altitude. Here’s a graph I extracted from a test flight:
(I had to use GPS speed for now, for some reason my airspeed sensor seemed inop.)
C3 is the forward motor, C5-C8 the quads.
I do see a decline in quad motor speed past 9 or 10 GPS.Spd, which seems good to me. There seems to be quite some delta between C6 and C8, I’m not sure why it is so significant.
I’m hoping to get another test flight in and increase speed even more to hopefully see all 4 quad motors pretty much idle. Is this the right approach?
EDIT: in the logs, is there a way to see if the code starts transitioning at some point?
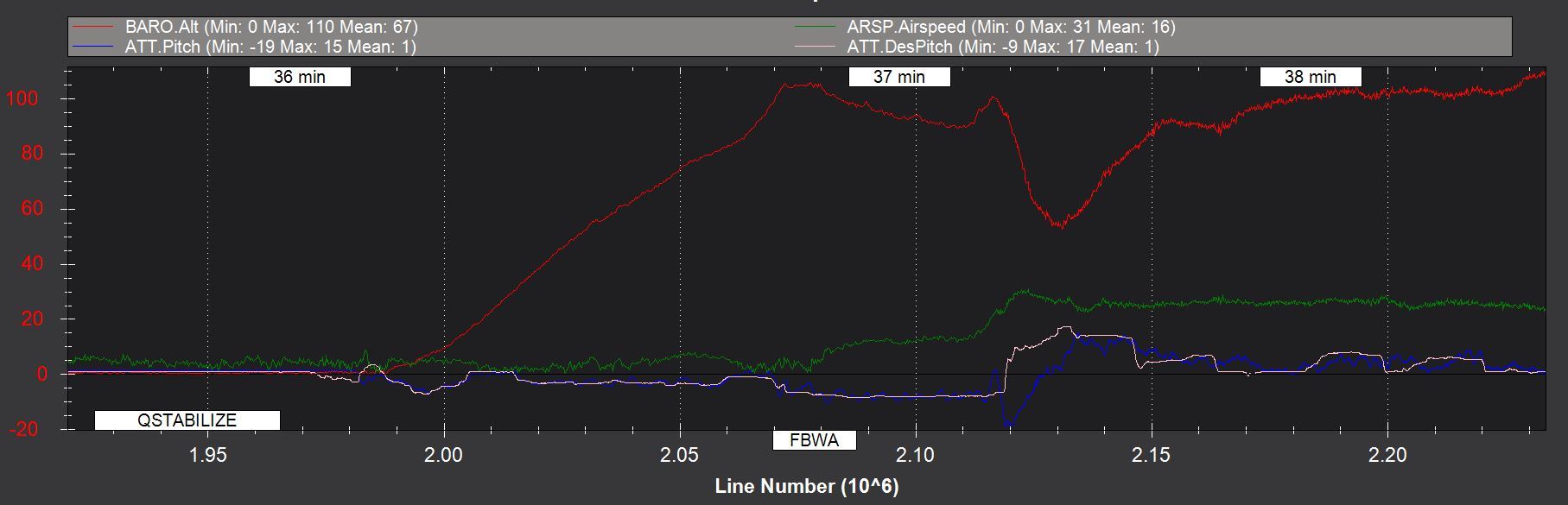
I tried once more the transition from VTOL to fixed-wing today and had a near crash. What happened is once the transition seemed almost complete in FBWA, the nose pitched down and the aircraft lost about 10m before I managed to recover in QSTABILIZE and before it hit the ground nose first. The lesson learned is to try the transition at a much higher altitude.
As for the “post-mortem”, I’d like some help to try to understand why it started diving. Does the wing not provide enough lift?
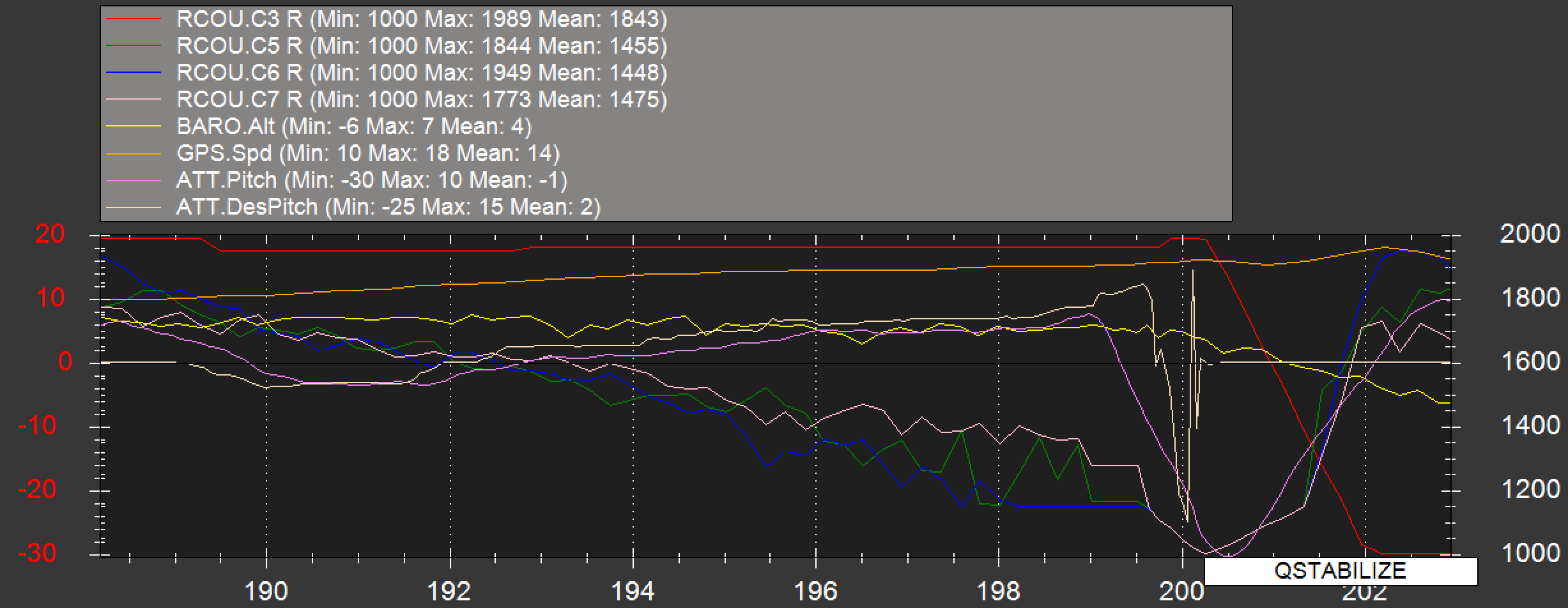
Here’s what I understand from the BIN log:
199131 - 12:58:22.170 - ATT.Pitch starts decreasing, ATT.DesPitch flat and slight increase
200078 - 12:58:22.930 - IMU.AccZ increases, plane going down
200238 - 12:58:23.067 - I manually change mode back to QSTABILIZE
200256 - 12:58:23.074 - all quad motors down to 1000 PWM
200261 - 12:58:23.074 - forward motor 1990 PWM, begin turn off to 1000 PWM; quad motors 1000 PWM, begin fire up
201974 - 12:58:23.880 - IMU.AccZ decreases, fall stops, quad motors still increasing at 1750 PWM
202185 - 12:58:23.974 - forward motor down to 1000 PWM
203290 -12:58:24.493 - IMU.AccZ flat, vertical acceleration stops, still climbing and recovering
The GPS speed was about 15m/s. I had turned off AS with ARSPD_USE=0. The AS sensor isn’t calibrated, I’ll need to do so once the plane flies fixed-wing for a few minutes. I was flying against the wing, I guess around 5 knots. ARSPD_FBW_MIN=13, Q_ASSIST_SPEED=13, Q_TRANSITION_MS=5000.
Third is a charm as this time the transition worked, with enough altitude.
Are the other QuadPlane users seeing significant altitude drops when the transition completes, i.e. the quad motors are being turned off? I’m seeing 20 to 40 meter drops. Throttle is already at max, so I pull back on the pitch stick and it slowly raises its nose. It takes a few second until it’s level and not losing altitude anymore.
I’ll try to use a lower Q_TRANSITION_MS (currently 7s) and/or ARSPD_FBW_MIN (currently 13m/s). I have a feeling the quad motors disturb the airflow coming to the leading edge of the wing quite a bit, and a longer transition doesn’t help. It also seems like I’m unintentionally lowering the throttle at times, I’ll watch for this and make sure it stays at its maximum.
Can others share data/logs regarding their transition? This would be helpful, thanks!
We are experiencing the same loss of altitude when switching from QLoiter/QStabilize to FBWA. The quad to fixed wing transition looks pretty good but it definitely dives hard for a while. It was almost a big problem the first few times as I had the Max Climb set to 20deg and lost over 100 ft before we we able to climb again (Airspeed was plenty fast enoughfor climb performance on this aircraft.) Changed Max Climb to 30 deg and now I can control the decent, its just a bandaid though. Our aircraft flies fine in Manual mode but I am going to re-tune next time out just to make sure.
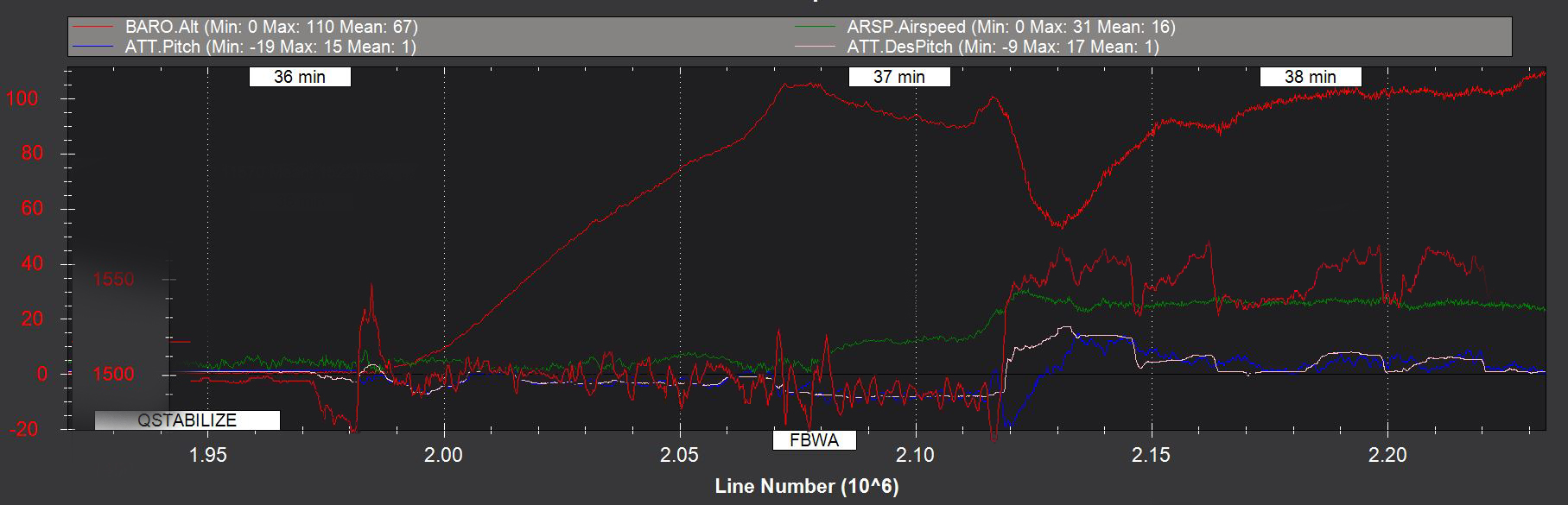
I have not figured out how to get the RCouts to overlay due to the high values, but I did my best in Photoshop.
As you can see, (Noisy Red line is RCOUT2) there is an initial negative elevator pitch during transition and then it trims out higher, so I can work on better manual trim of the aircraft.
That doesn’t explain (to me) why the plane continues to lose altitude well after the airspeed passes through 20 m/s. (it climbs fine at that speed)
After looking again at this graph it does suggest it could be an aerodynamic issue. I’ll start with confirming neutral GC, manual trim, and probably raise FBW MIN ASPD.
This behavior, as well as the abrupt nose pitch up during transition that others have discussed, happened when I switched to 3.7 so im just a little suspicious. However, there were also some air frame changes at the same time I updated firmware (bad practice, I know). So I will continue to look into it and post back what I find.
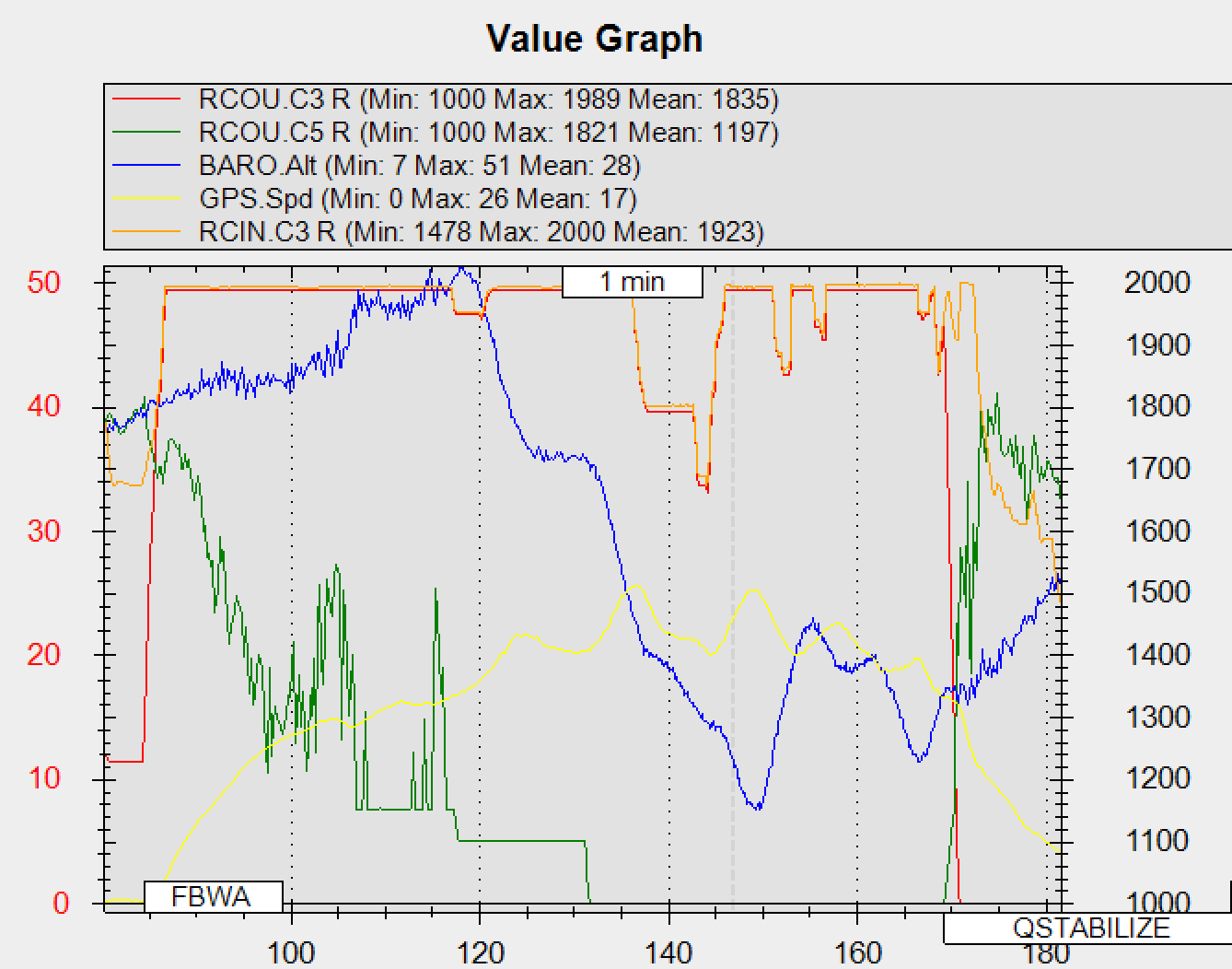
If you select a value with the left mouse button it will use the left Y axis. If you use the right, you will get a new scaled Y axis on the right side.
For me it looks like the elevator response is to low to pull your nose up. The maximum while loosing altitude is around 1550, that is nearly neutral in the servo range and not much more than it uses to stay level (between 2.15 and 2.20 on your time axis)
First of all thank you very much for the mission planner tip! that makes a world of difference in analyzing logs.
I tried to switch back to 3.6 to troubleshoot. However, I could not get the quad motors to idle when armed on 3.6, I’m pretty sure I was able to do it before, but after 2 tries and and a full day of trying, I just switched back to 3.7. (My ESCs cannot be allowed to stop because I cannot turn off the soft start feature witch leads to awful instability in descents) I am hoping to get some more flying in this week. and plan of re-tuning in manual mode. I will check back in.