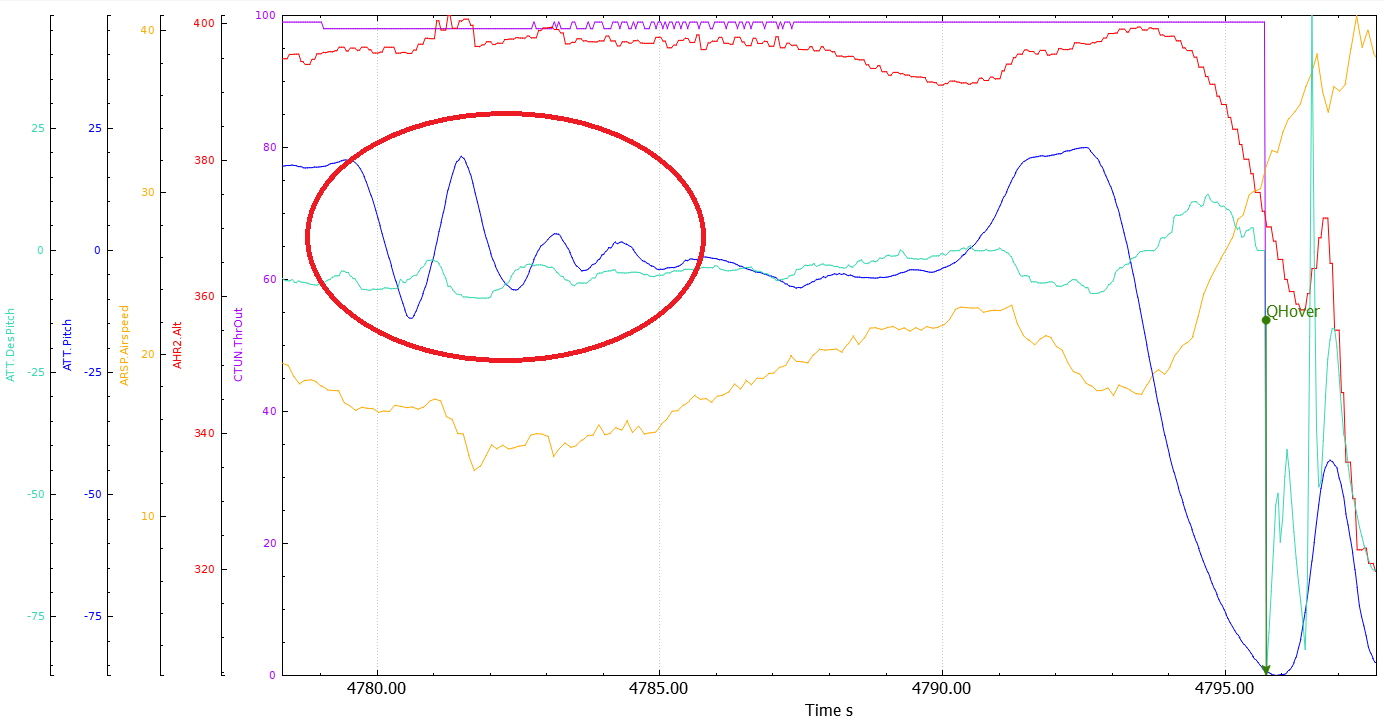
I know this is getting old, but again I must advice you to check your Plane Pitch PIDs. Overlaying your Pitch vs Desired Pitch already shows problematic trends during transition:
(Sidenote: I can’t seem to get messages to show when I opened your log, but this is probably a problem on my side)
The default PIDs don’t always work well for everyone. To get a good set of starting PIDs, you can refer here: Configuration Values for Common Airframes — Plane documentation. For large quadplanes, the closest would be the Mugin airframe.
You pretty much answered it over here:
which basically means that the quad motors don’t have enough time to save the plane. One way to prevent this is to transit at higher altitudes to give Q_ASSIST more time should anything go wrong.
I tried looking at the log, couldn’t find any big problems apart from the PIDs and what you described so far. Sensors and power look ok, IMU vibrations are pretty low, EKF isn’t throwing out any flags, and the quad motors are responding as you described.
So it might look like a mechanical fault; the elevator servo would be the first thing I would check. Having aggressive PIDs, coupled with your constant pitching up and down (due to the tail heaviness as you described), could have put lots of strain on the servo.
You might want to refer to this link where we experienced an almost similar problem; some of the advice given there might help.