I have a large QuadPlane with 60kg MTOW, 32inch props, T-Motor BLDC motor, Flame 180A HV ESC, Pixhawk Orange and ArduPlane v4.1.4 firmware installed.
I have experienced large and increasing roll oscillations in VTOL take-off and VTOL landing phases of an auto mission in a calm day. The fast transition from VTOL to FW and switching QHOVER at landing saved the aircraft.
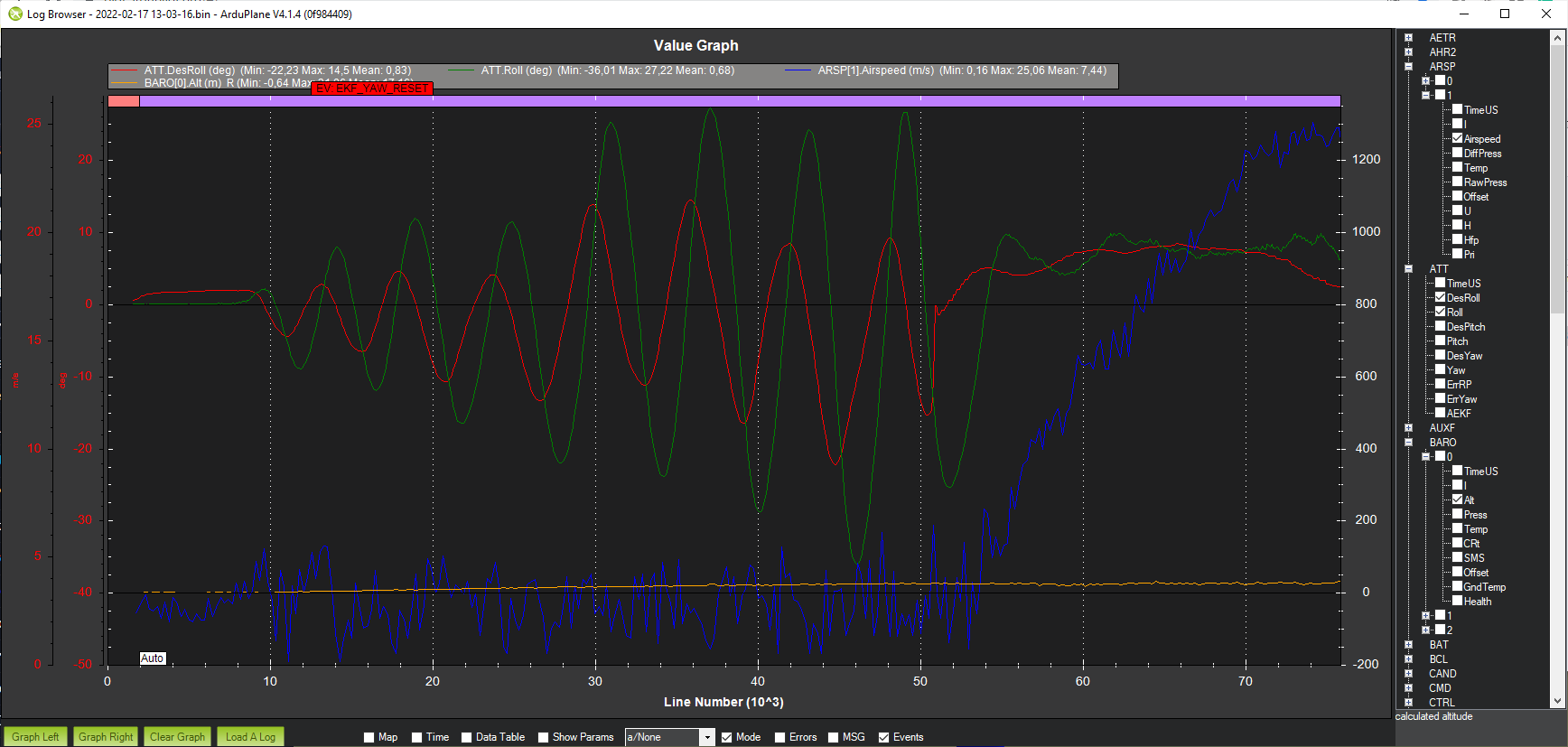
Below graph shows that the vehicle becomes unstable at roll while Auto-Takeoff in VTOL mode and transition to FW mode saves the vehicle from further oscillations.
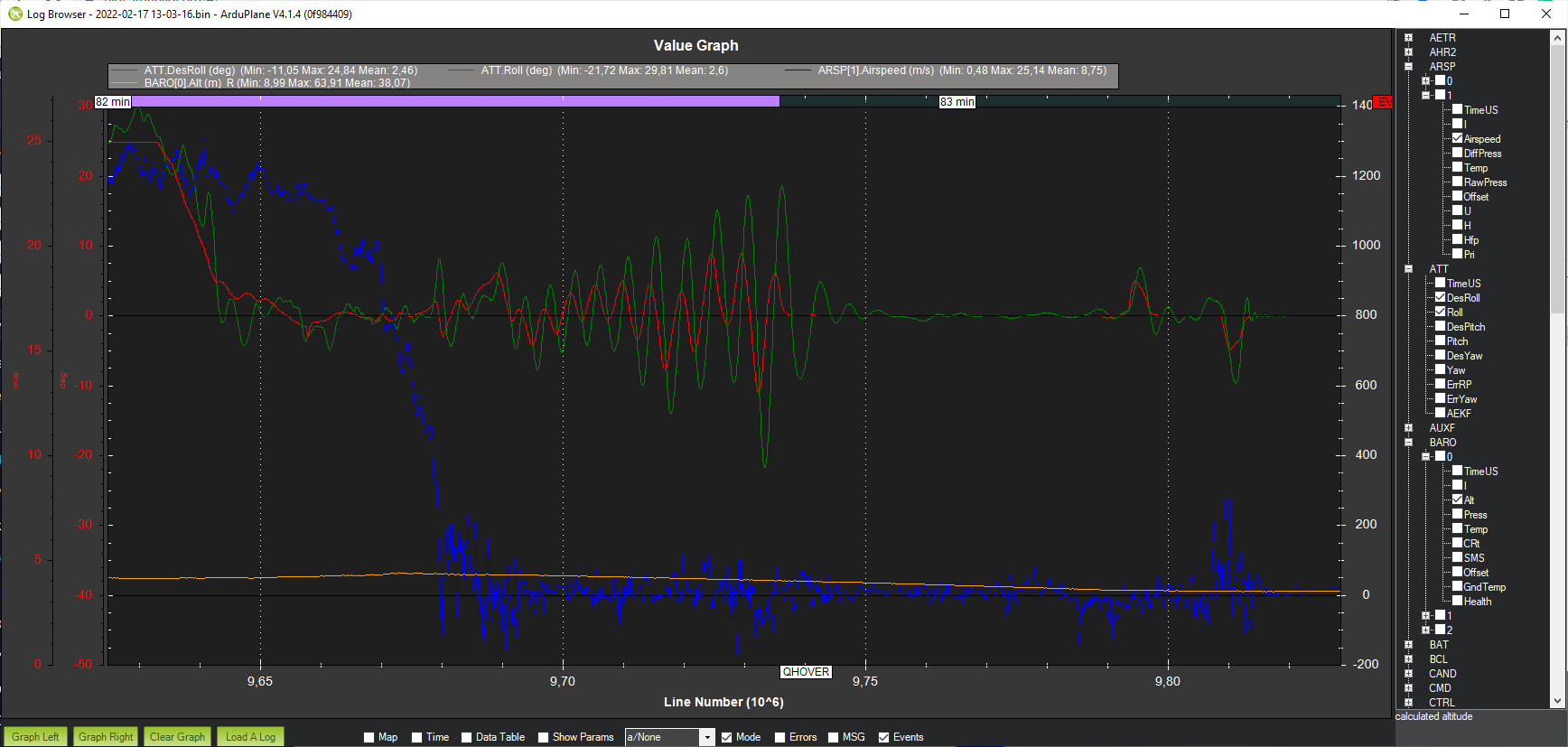
Below graph shows that the vehicle becomes unstable at roll at position-controlled VTOL mode, and stabilizes after switching to QHOVER.
You can download the log file from the following link.
https://drive.google.com/file/d/1eVeJ4nAYHorayRGlMIh2i70Yi690Qqfy/view?usp=sharing
Could you please advise me on these oscillations?
Best Regards.