I have a Volantex Ranger that I converted to a Quadplane. I am currently running Ardupilot V4.0.5. I have flown this aircraft successfully many times before.
I had set up a mission in Q Ground control where the aircraft would VTOL takeoff and go to a few points and loiter. All at a relative altitude of 60 m. At an altitude of approximately 30 m the Aircraft fell out of the sky. This happened twice, both times a different motor cut out when it got high in the air. The back right motor seemed to stop on the first flight and the front right seemed to cut out during the second. I assume this because the aircraft flipped downwards in each of those motor directions when it fell.
I had flown this aircraft via RC in QSTABILIZE before the second crash and it took off without any problems.
I do not think it is a hardware issue. I strapped the aircraft down and throttled the VTOL motors to 100% (in QSTABILIZE mode) for 1 minute and did not see any of the motors cut out.
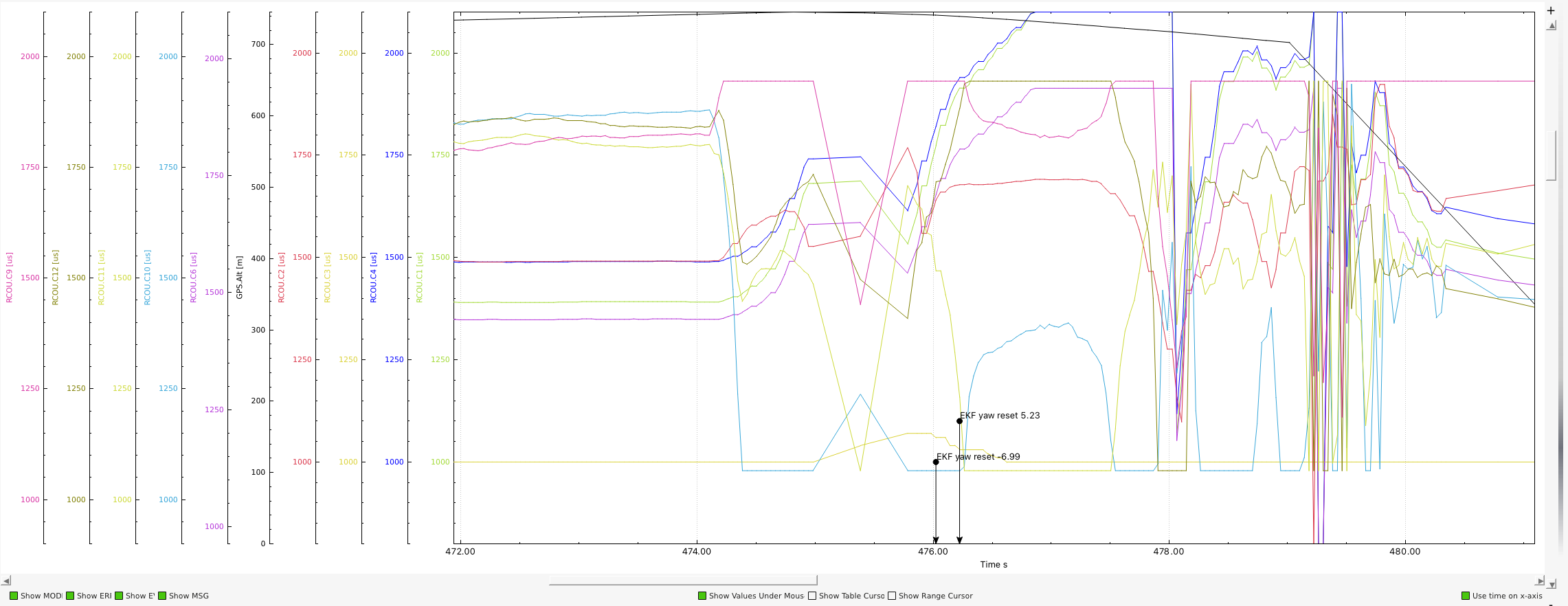
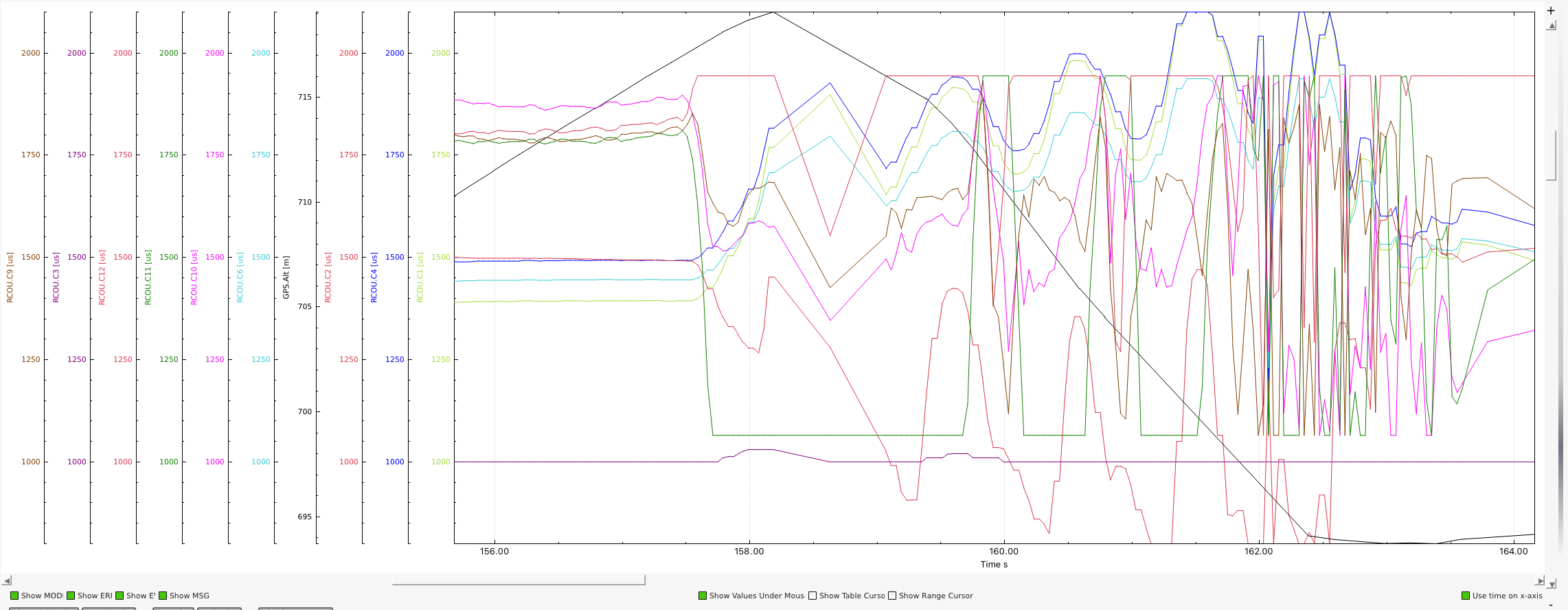
You can clearly see the motor output peak at max and the opposite motor being shut down to compensate.
The motors/esc are working at max output and it may have something to do with no headroom to combat disturbances
I noticed the motor failure from the graph too. It points towards a hardware issue. I do not believe this to be a hardware issue because all connections were ok and I tested the aircraft with RC control too.
It seems to only occur when I use Ground Control Software to fly.
If you look at the values being sent to the motors they are at max for just taking off.
Consider the greater mass of the plane and that disturbances are going to need headroom in throttle to overcome that mass disturbance.
It could be there is just not enough authority.
Have you autotuned the quad motors?
I used transmitter based tuning to set the pid values for the aircraft. I would set a value for PID and check the desired attitude vs actual attitude graph after each flight. It flew pretty well on RC. The only difference was a gopro I strapped over the CG on the top of the wing. I’ve flown with the same gopro before just mounted to the bottom of the wing.