In QLOITER, the QuadPlane seems to yaw clockwise at the rate of 30 degrees per minute, with zero pilot input.
Everything in the logs looks “normal” and the IMUs/MAGs are registering that change.Except the FC isn’t correcting the error.
I checked my motors/props and they seem relatively well aligned.
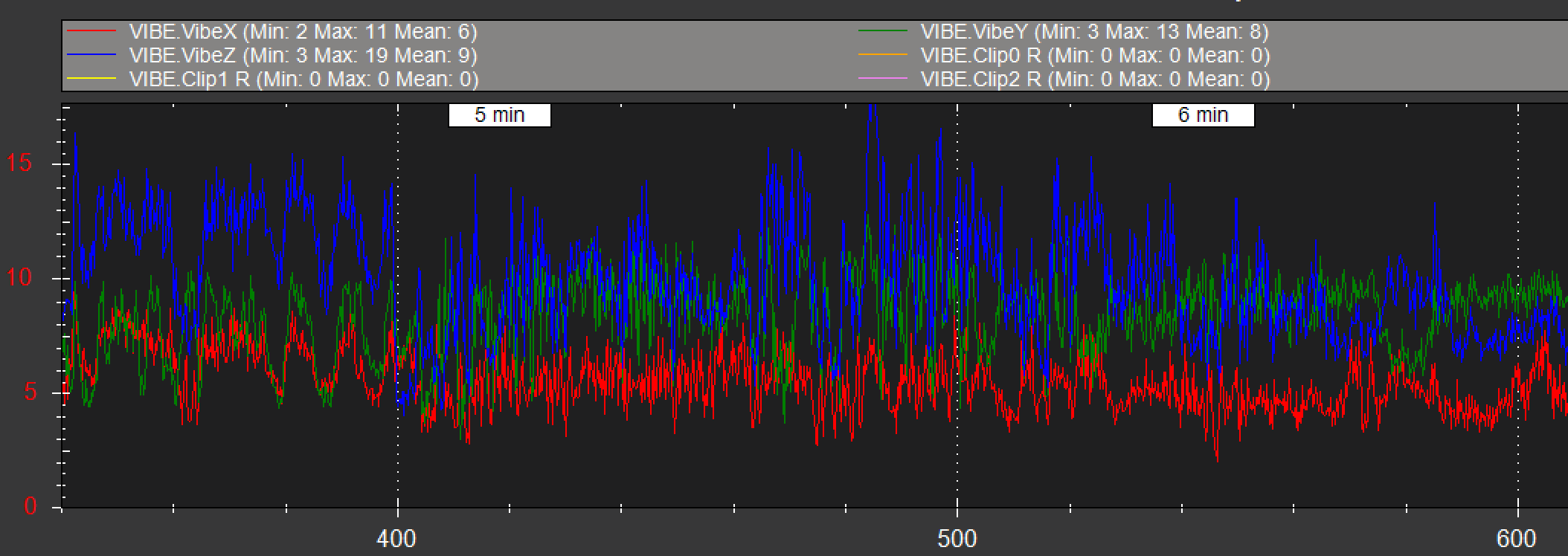
Vibrations a little higher than I’d like but still reasonable and no clipping.
Q_A_RAT_YAW_D, 0
Q_A_RAT_YAW_FILT, 5
Q_A_RAT_YAW_I, 0.06
Q_A_RAT_YAW_IMAX, 0.222
Q_A_RAT_YAW_P, 0.6
DF log: Dropbox - File Deleted - Simplify your life
Params: v2-2017-04-22.param.txt (12.9 KB)