Hi, I’ve been recently working on a quadplane, and had some problems about the position controller. Actually, I’ve read the basic instructions about the control structure at this link: Plane Architecture Overview — Dev documentation, but there is no mention of the detailed structure of the position control, then I just tried to figure out it by reading the source code.
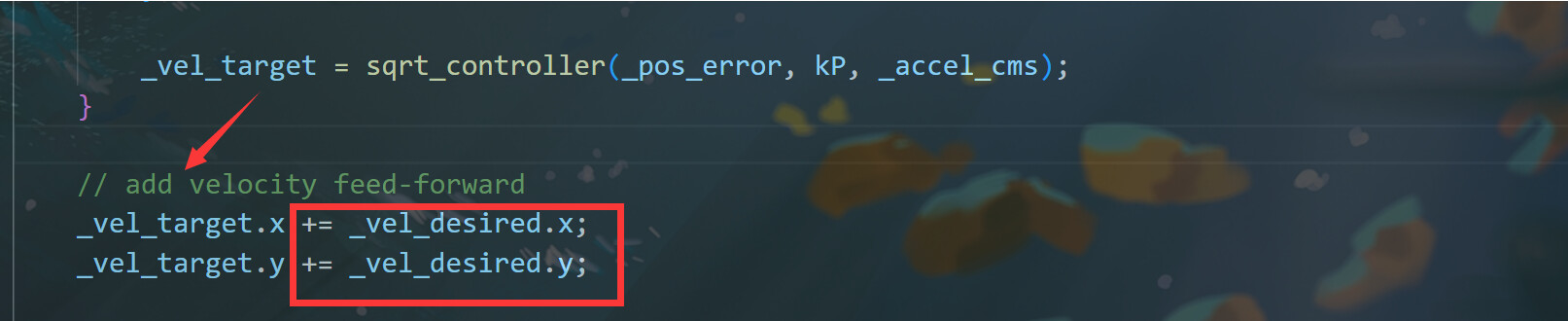
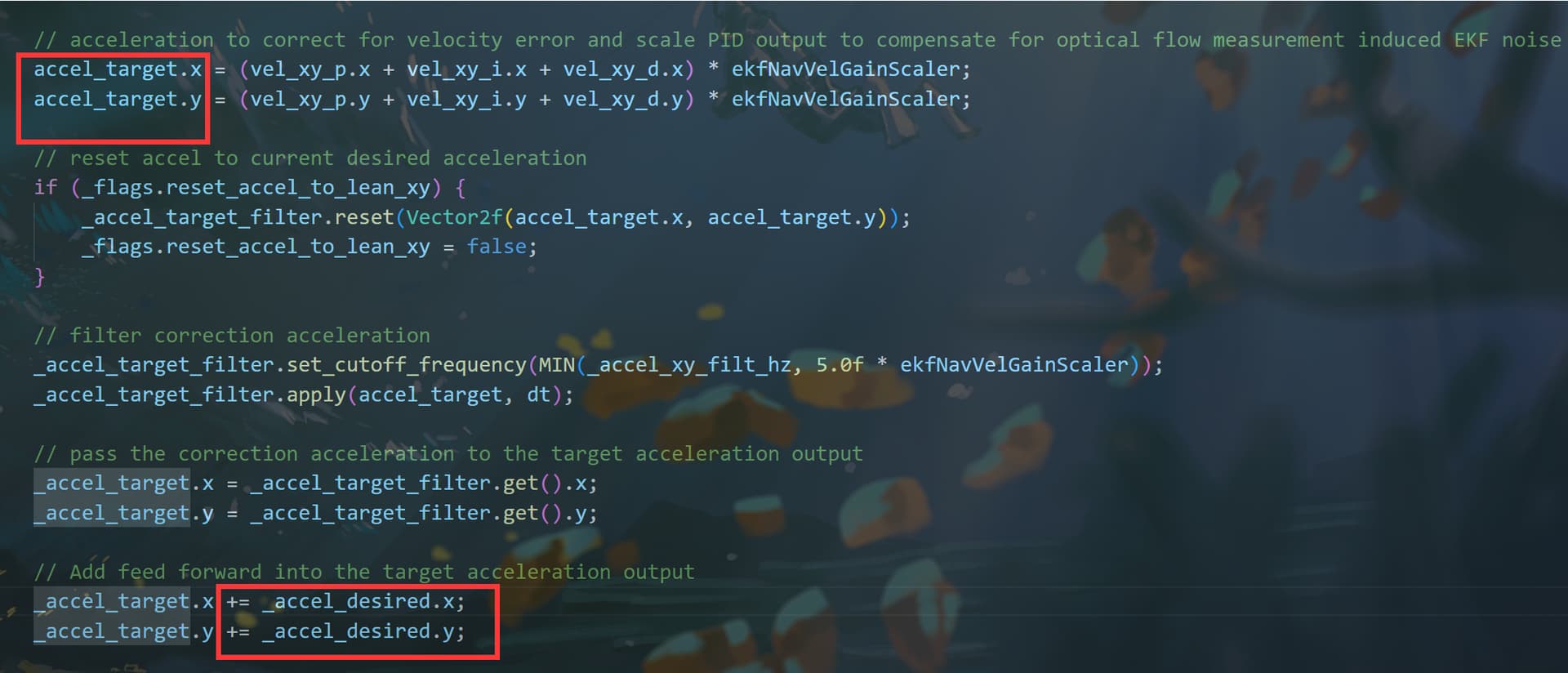
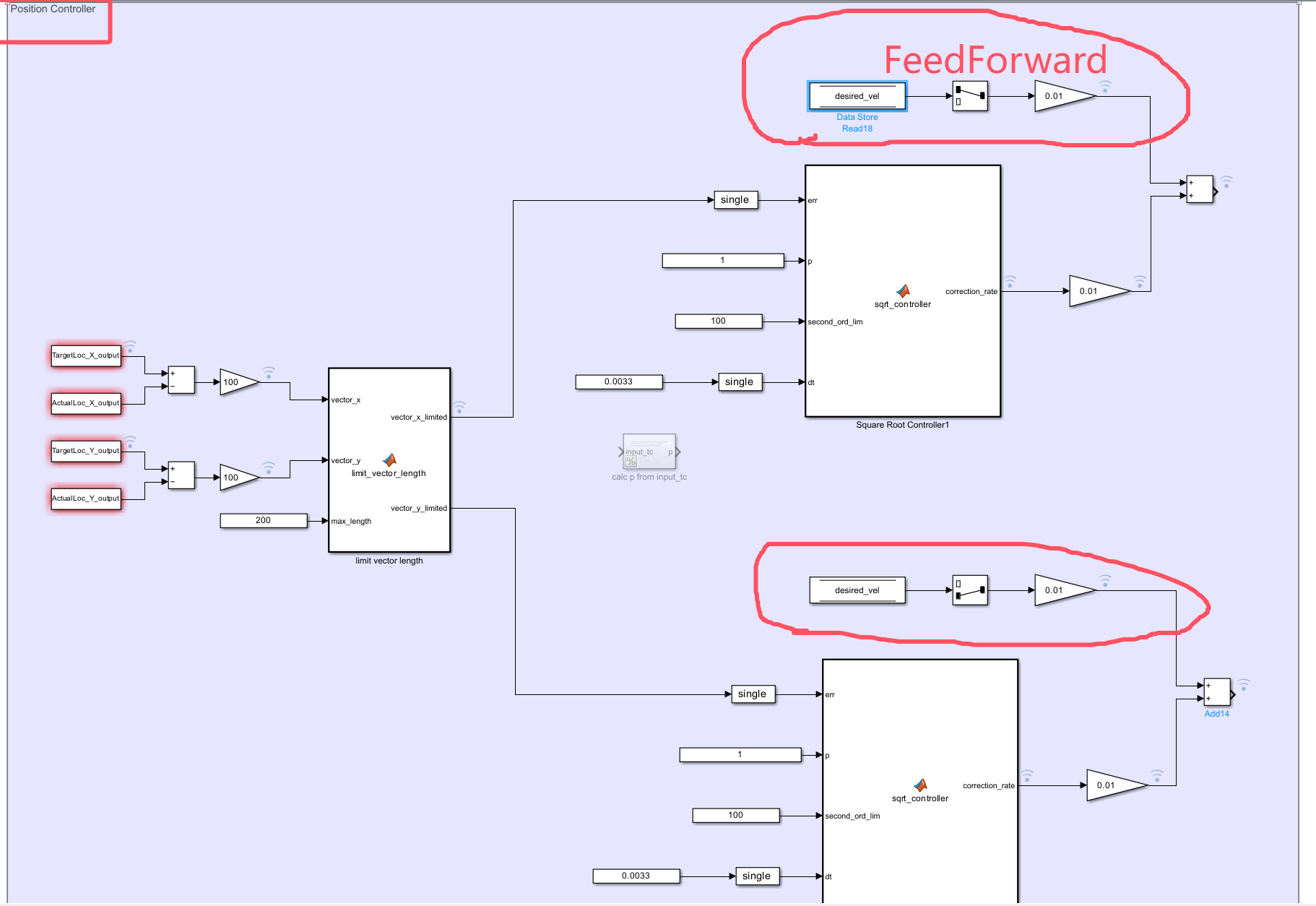
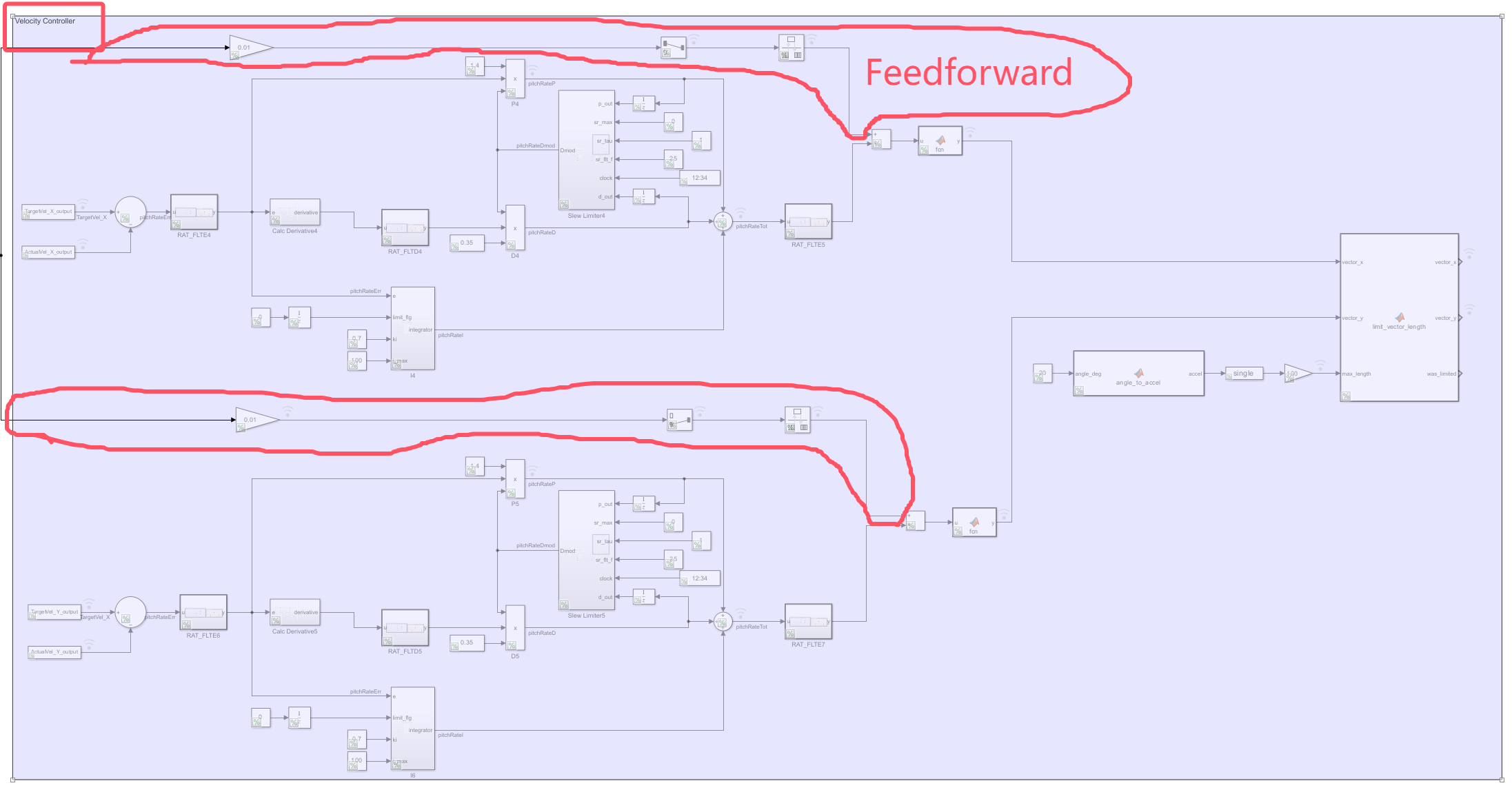
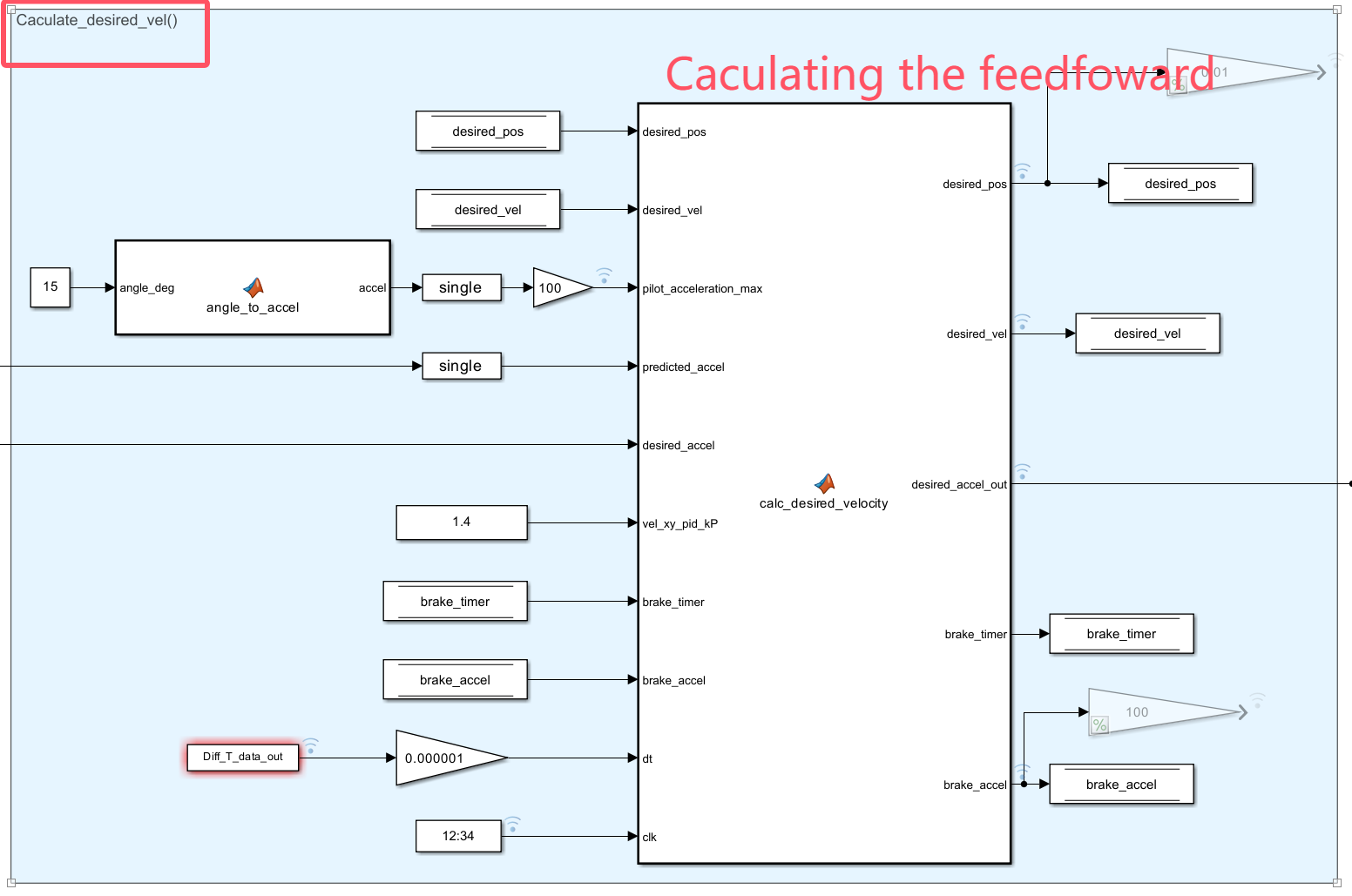
Here I attach the structure which I drew after reading the source code.

Is this structure right?