Good info @iskess! Thanks. I’m curious as well on the motors you are using considering smaller props will yield less thrust and higher power requirements for the weight of a large platform.
Also you mentioned shorter booms. How long are you making your booms?
Sunnysky X2216-7 1400KV
1 Like
Hi Jeff, no, they just pass underneath the fuse and stay in position with a little tension. Because it’s a high wing with a deep fuse, there is some good “triangulation”.
Also, just to point out, one could probably use any decent string instead of fishing trace cable. The reason I went with the latter is that I could create a loop at each (using crimps) which slips over the extended motor mount screws. Therefore no knots to tie.
OK thx. Jacques.
Although I can see how having the diagonal cables help with reducing the arms from twisting in yaw, whilst the diagonally opposite motors accelerate to yaw and pull the cable taut under the fuselage, I’m not confident it will reduce the issues seen here where both front quad motors are pitching up during transition causing both wings to twist. To stop that from occurring both front motors need to be restrained at the same time relative to the fuselage, because in this case both rear motors are not accelerating at the same time as the front. This means the cables would need to be restrained to the fuselage as well as on the motors, so they are of a fixed length to the fuselage itself.
This shouldn’t be hard to do either and would just require a plate on the underside and screw/bolt onto which all the cables are connected. I’d image that the arms would themselves then twist when the motors accelerate producing thrust at an angle away from the fuselage. This should be fairly minimal though.
Sam,
My approach was to anchor 60lb thin black test line from each boom tip to the solid t-nuts near the front of the plane meant for mounting the optional gimbal dome. The t-nuts are held by the plywood frame inside. I think Jacques’ build is more solid than mine so he may not need to anchor his lines. My initial indoor test using string showed the movement you mention.
Great transfer of ideas here!
I’ll post some photos after work…
Another way would be to add a wire between the two front motors under the fuselage in a straight line as well as the diagonal ones. None of the cables would have to be attached to the fuselage then. Maybe try to pre-tension it a little?
The added fishing line really locked in the booms and the Ranger now feels like a solid assembly! This may not be my final installation but it was good enough for my next test flight using parts that I had on-hand. I used Sevalon 60lb test nylon-coated black line. Since I didn’t want the line to pull on my motor mounts because they might slip, I drilled a hole through the square carbon rod for an M3 coupler and lock-nut. The plane end of the lines used adjustable 4-40 Kwik Links anchored by Du-Bro (#158) Steel Landing Straps into M3 bolts in the stock camera mounts. It should make for a fun next flight test. 





3 Likes
Awesome update @GregCovey. I’m rooting for you! Looking forward to seeing the next flight test.
Looks good. I think that should get you over the transition hurdle and it should should be smooth sailing from then on. 
Looks solid, Greg! Looking forward to your next flight report!
Greg, any further updates following the addition of the fishing wire? Just curious…
Friday was a wet mess but Saturday we found a dry field to test in. In Test Flight 4, my Ranger EX QuadPlane was fitted with 60lb test fishing line to eliminate the see-saw effect on the booms. Although we had a difficult take-off area in a wild field, it worked well thanks to Jacques.
In the first flight, I had left the air speed sensor cover on and both QSTABILIZE and FBWA modes worked well. I’ll need to look at the logs to see if my quad rotors ever stopped helping. It seems like forward flight motor has limited thrust although it worked well when testing with the normal wing set.
In the 2nd flight, with the AS sensor covered removed, the infamous pitch up issue was apparent. I suspect this happens when the hover assist engages from Q_ASSIST_SPEED. Although the landings caused no damage, when the fishing line breaks the tall weeds, it sounds bad. I had two flights without any damage.
I haven’t retrieved the logs yet but I’ll post them soon…
Test Flight 4 Logs
Flight 4a (24meg)
http://www.gregcovey.com/Reviews/62.BIN
Flight 4b (25meg)
http://www.gregcovey.com/Reviews/63.BIN
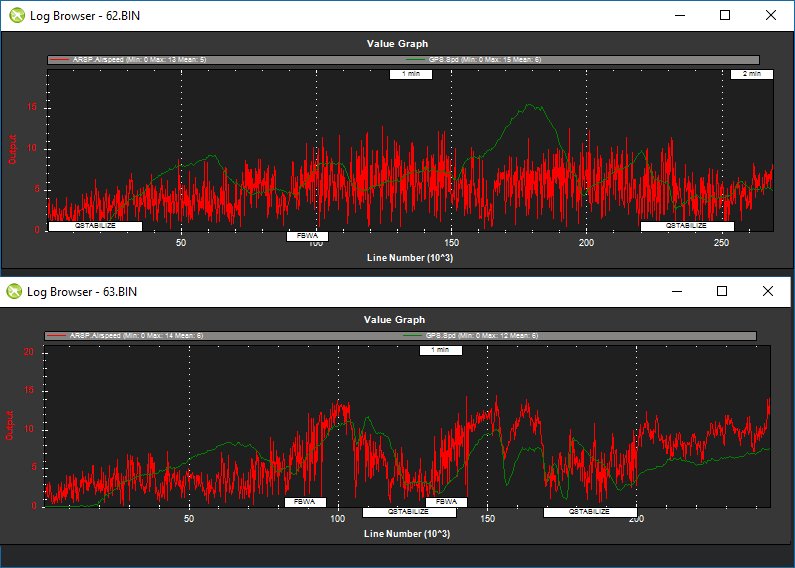
I graphed both flights in each image; one for current and the other for air speeds.
The current graph shows that while the AS sensor was covered, I always had hover rotor assist. When uncovered there may have been brief times when the hover motors shut off. I feel that when they activate again, this is where the pitch up occurs.
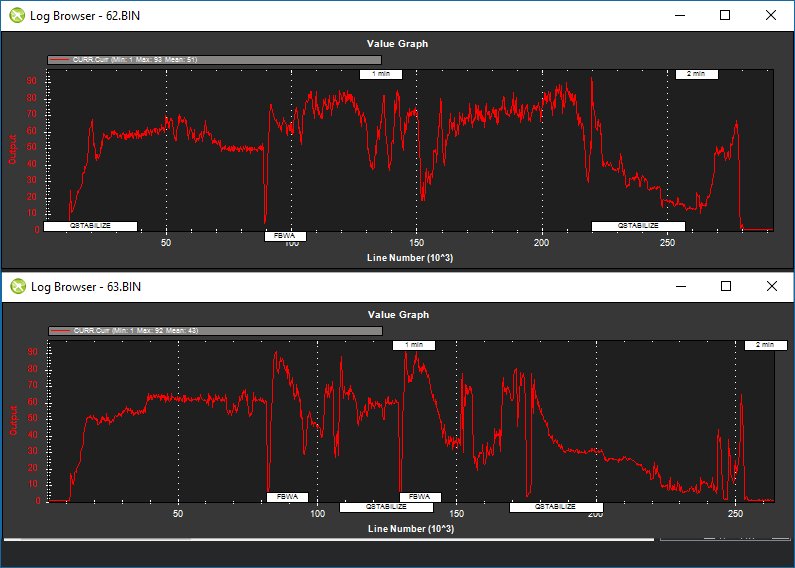
For the 62.BIN log, this was when I had the AS sensor covered with a foam plug. The lower 63.BIN graph shows the AS sensor and GPS speed in agreement. However, the speed rarely went above my Q_ASSIST_SPEED setting of 10m/s. This makes me feel that I need a larger forward flight power system as my throttle setting was at 70%. All comments are welcome!
Hi Greg
Well that’s annoying…
I think the wires need to be straight inline across the fuselage and fairly taught. Wires on an angle will still allow it to move…
Could you maybe do a video from the wing end where it shows the movement when you lift one of the front quad motors by hand please? And then one of the rear motors as well. I’m wondering how much movement there is still and how it moves. Another really good video would be one from a flight, with the camera pointing towards the fuselage from the wing tip, with the forward motors in view. Hopefully we can still figure out whats going on!
In regards to you forward propulsion setup you can also test how much static thrust you have by placing it nose first on a scale, then setting the scale to zero, and carefully going to full thrust whilst keeping clear of the props. From that and the pitch speed we should be able to tell what it is capable of.
I also have a sneaking suspicion there’s something going on with the quad setup parameters. I’ll go through it tonight and otherwise run it on SITL and see what it does. Maybe that will highlight something. What forward motor/prop/ESC/battery combo are using atm?
Hi Sam,
Thanks for the comments. The stock Ranger EX power system is a 3715 1000kv motor, 40-amp ESC, and 10x6 prop. Normally, it runs on a 3s Lipo but most of us use it on a 4s Lipo from 8AH to 12AH capacity without issue. It seems to work fine for stock flying but I recall that it still needed 1/2 to 3/4 throttle.
If the fishing line tension is critical then I don’t think I want to focus on that approach. I’m thinking that it may be a hover motor start-up issue possibly due to a setting or two. However, I can still do a ground video for you.
In addition to the suspect forward thrust, I agree that there may be some parameter changes needed. I does hover nicely once it gets started so I stopped adjusting PIDs at that point. My QP armed throttle setting is 0 so the motors don’t spin and I was wondering if it would be better to go back to the default of a slow spin?
I’m not sure what my next step on the Ranger will be other than to re-test it with APM using the stock wing. I want to test my AS sensor in a normal flying configuration and would like to play with CRUISE mode. My buddy has the same plane, and when using APM Plane v3.6.0 or v3.7.1 on them, they are a joy to fly!
As you know, I have also gotten the mini Talon / Mozzie bug so I have been enjoying my recent ordering spree and plan to start a new thread on it soon. A slightly smaller frame, dedicated to be a QP, that can also carry a payload will be a nice addition.
I spotted what appears to be a similar issue in the Plane v3.8 forum.
QuadPlane Full Pitch Flip in Transition from VTOL to FW – Near Crash
Greg, I bumped into this recently. Check it out. It is a Ranger with the booms located same location where you have them. Further, they do not require any additional cross bracing/tension wires for boom stability. Curious…
1 Like
Hi Alex,
Yes, that is Carlos. He posts on my RCG APM thread. He is using the PX4 stack like Rollys and used a design similar to mine. For some reason that we haven’t discovered yet, the PX4 stack works for the Ranger EX QuadPlane but the APM stack does not.