Test Flight 4 Logs
Flight 4a (24meg)
http://www.gregcovey.com/Reviews/62.BIN
Flight 4b (25meg)
http://www.gregcovey.com/Reviews/63.BIN
Test Flight 4 Logs
Flight 4a (24meg)
http://www.gregcovey.com/Reviews/62.BIN
Flight 4b (25meg)
http://www.gregcovey.com/Reviews/63.BIN
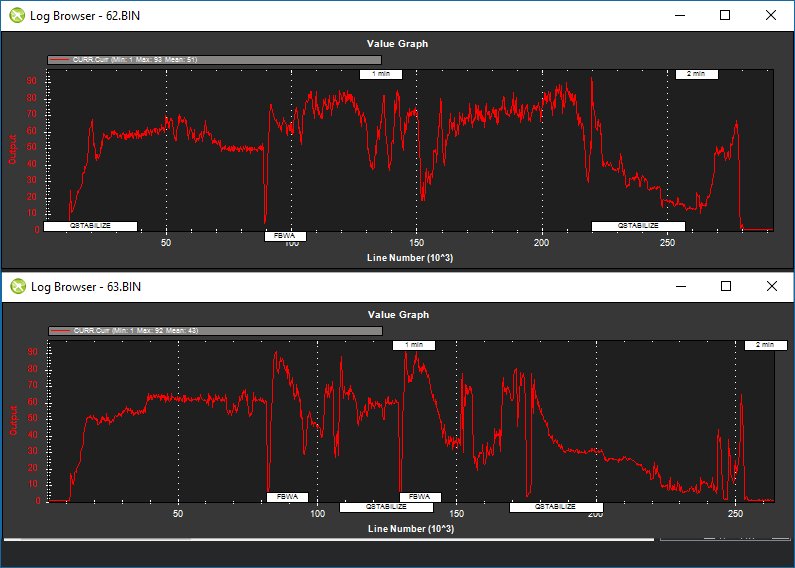
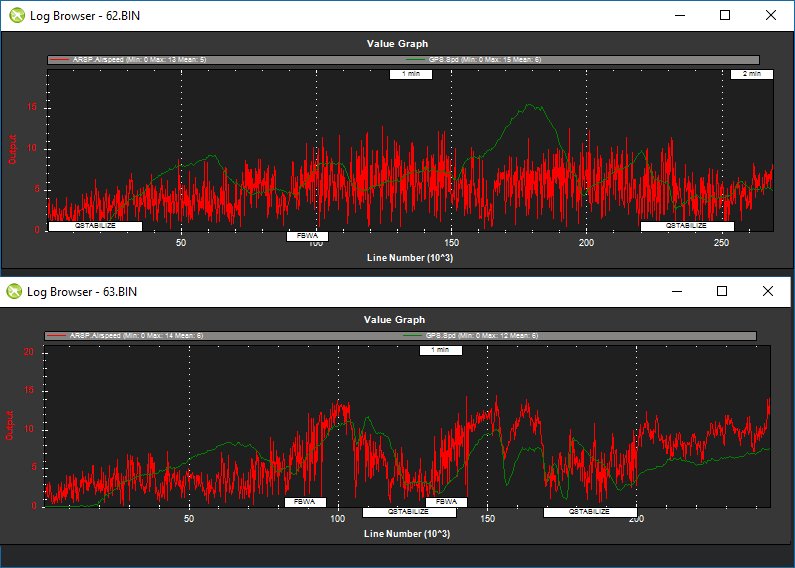
I graphed both flights in each image; one for current and the other for air speeds.
The current graph shows that while the AS sensor was covered, I always had hover rotor assist. When uncovered there may have been brief times when the hover motors shut off. I feel that when they activate again, this is where the pitch up occurs.
For the 62.BIN log, this was when I had the AS sensor covered with a foam plug. The lower 63.BIN graph shows the AS sensor and GPS speed in agreement. However, the speed rarely went above my Q_ASSIST_SPEED setting of 10m/s. This makes me feel that I need a larger forward flight power system as my throttle setting was at 70%. All comments are welcome!
Hi Greg
Well that’s annoying…
I think the wires need to be straight inline across the fuselage and fairly taught. Wires on an angle will still allow it to move…
Could you maybe do a video from the wing end where it shows the movement when you lift one of the front quad motors by hand please? And then one of the rear motors as well. I’m wondering how much movement there is still and how it moves. Another really good video would be one from a flight, with the camera pointing towards the fuselage from the wing tip, with the forward motors in view. Hopefully we can still figure out whats going on!
In regards to you forward propulsion setup you can also test how much static thrust you have by placing it nose first on a scale, then setting the scale to zero, and carefully going to full thrust whilst keeping clear of the props. From that and the pitch speed we should be able to tell what it is capable of.
I also have a sneaking suspicion there’s something going on with the quad setup parameters. I’ll go through it tonight and otherwise run it on SITL and see what it does. Maybe that will highlight something. What forward motor/prop/ESC/battery combo are using atm?
Hi Sam,
Thanks for the comments. The stock Ranger EX power system is a 3715 1000kv motor, 40-amp ESC, and 10x6 prop. Normally, it runs on a 3s Lipo but most of us use it on a 4s Lipo from 8AH to 12AH capacity without issue. It seems to work fine for stock flying but I recall that it still needed 1/2 to 3/4 throttle.
If the fishing line tension is critical then I don’t think I want to focus on that approach. I’m thinking that it may be a hover motor start-up issue possibly due to a setting or two. However, I can still do a ground video for you.
In addition to the suspect forward thrust, I agree that there may be some parameter changes needed. I does hover nicely once it gets started so I stopped adjusting PIDs at that point. My QP armed throttle setting is 0 so the motors don’t spin and I was wondering if it would be better to go back to the default of a slow spin?
I’m not sure what my next step on the Ranger will be other than to re-test it with APM using the stock wing. I want to test my AS sensor in a normal flying configuration and would like to play with CRUISE mode. My buddy has the same plane, and when using APM Plane v3.6.0 or v3.7.1 on them, they are a joy to fly!
As you know, I have also gotten the mini Talon / Mozzie bug so I have been enjoying my recent ordering spree and plan to start a new thread on it soon. A slightly smaller frame, dedicated to be a QP, that can also carry a payload will be a nice addition.
I spotted what appears to be a similar issue in the Plane v3.8 forum.
QuadPlane Full Pitch Flip in Transition from VTOL to FW – Near Crash
Greg, I bumped into this recently. Check it out. It is a Ranger with the booms located same location where you have them. Further, they do not require any additional cross bracing/tension wires for boom stability. Curious…
Hi Alex,
Yes, that is Carlos. He posts on my RCG APM thread. He is using the PX4 stack like Rollys and used a design similar to mine. For some reason that we haven’t discovered yet, the PX4 stack works for the Ranger EX QuadPlane but the APM stack does not.
That’s so far 2 for 2 that we have seen the Ranger working flawlessly but happens to be on PX4. Therefore, I would venture to say, the issue may not be completely structurally related but somewhere in the settings. Have you tried going back and testing without an airspeed sensor? I recall one of your initial FW tests without the sensor worked well and didn’t create the “pitch-up” issue. Just curious.
Alex,
Yes, you are correct. In the first flight of my latest video above, the plane worked well without the AS sensor (because it was covered) but it also had the fishing line band-aid. Without it, there were loss of control issues as seen in my previous videos.
My next test will likely be as a normal wing APM plane. This worked well and I want to repeat it as I have two wing sets for my Ranger EX. I’m still contemplating this issue as I work on my mini Talon conversion. I feel that maybe my current PID settings for hover may be causing a startup issue that causes the see-saw effect. There may also be an issue with my Q_M_SPIN_ARMED setting of 0 (no spin) as compared to a slight spin setting. Looking at the current graphs above, when FBWA initializes, the current drops to near 0. Could this be stop/starting my ESCs?
Actually you mentioning the “see-saw effect” just reminded me of a test I made using your PID’s at one point. I also did get a “rocking” effect as well during hover. However, in your latest videos I didn’t see any issues during your hover.
By the way, the initial flight I was referring to was this one below. It felt you were able to manage a “successful” fw flight for some time before the crash.
Alex,
The issue is caused by the hover motors re-starting up in FBWA mode, not the initial transition from QSTABILIZE to FWBA. QSTABILIZE mode is fine because once the motors start, they stay on…even when tumbling.
The various effects you see are with and without an AS sensor which kicks in (and out) the hover motors more accurately in sync with the true airspeed and GPS ground speed differential. Without an AS sensor, the Q_ASSIST_SPEED trigger can only go on GPS ground speed.
In summary, my PIDs were adjusted for a good hover response. When starting from the ground, the plane is stabilized by the wheels. In flight, however, the hover motor re-start is an issue.
@GregCovey, sorry for weighing into this discussion so late. Just thought I’d mention that the first 3.6.0 log you posted (59.BIN) also showed a large pitch up in FBWA twice. It went to 35 degrees up the first time, and 61 degrees up the 2nd. It didn’t go as far up as the other logs, but the problem is definitely there.
One possible clue to the difference in extent of the pitch-up is that you had THR_MAX at 75 in the 3.6.0 flights (which was the default in versions prior to 3.8) but THR_MAX at 100 in 3.8. The faster transition due to higher fwd throttle may be a contributing factor.
@GregCovey have you tried setting up this quadplane as an H frame? You’re clearly getting a lot of wing twist, and the frame is laid out as an H, not an X, but it is configured as an X. The difference between X and H is the direction of the twist the motors impart to the frame.
I think you should try Q_FRAME_TYPE=3 and reversing the vertical motors (thus making it a H frame).
Hi Tridge,
Thanks for visiting! I like your suggestion and will give it a try. Also, nice catch on the THR_MAX default setting. If I had one last question to ask, it would be what you thought the best setting is for Q_MOT_SPIN_ARMED on a QuadPlane?
Cheers!
I just use the minimum setting that keeps the motors spinning without and hiccups.
that depends on the individual hardware. You want it to be a level that causes the motors to reliably spin, but not so fast that it would hurt someone if their hand got in the way. I usually adjust it up and down until I’m happy with it based on that criteria.
Ok, thanks guys, I’ll change my setting from 0 to a slow spin when armed.
When I built this QuadPlane, I used the HK 3.5mm bullet connectors so it was an easy change from X-frame to H-frame buy swapping one of the connectors 180 degrees to swap the two outer wires. The props were then changed front-to-back and back-to-front. I then changed the Q_FRAME_TYPE from 1 to 3.
I didn’t have much time to test yesterday but in QSTABILIZE I could bring the tail up and move the plane properly forward, backward, left, and right with the transmitter stick. As soon as I lifted the gear mains off the ground, the plane would spin clockwise (when viewed from above) about 90 degrees per second. I’m not sure if I need to change PIDs or reverse the rudder control on APM.
That usually means Q_FRAME_TYPE is wrong. It is exactly the effect you get when you try to fly X as H or H as X
Double check your settings, and try using motortest to check the direction of each motor