Hello,
When flying Quadplane in AUTO mode, aircraft swithces to QRTL after flying in RTL as fixed wing, which is fine until now.
In QRTL mode, aircraft tries to reach Home point by pitching down (negative) the aircraft for maintaining Q_WP_SPEED = 5m/s, where the wind makes the aircraft loose altitude abruptly (causing QTUN.THR to 1) and cause pitch up and gain altitude (causing QTUN.THR to 0). Thus, while approaching to HOME point in QRTL, the aircraft moves like a dolphin. This oscillation stops when HOME point is reached and aircaft lands vertically.
I had about 10 flights like this and observed same pattern in 9 of them. Same pattern occurs even when Q_RTL_ALT = ALT_HOLD_RTL. I even tried Q_VFWD_GAIN : 0,05 with FW motor active but couldnt see any improvement.
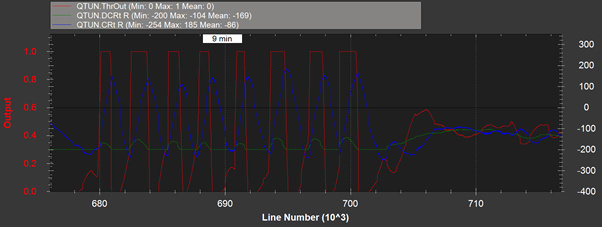
QTUN.ThrOut, QTUN.DCRt and QTUNCrt data from logs show that THR switches between maximum and minimum while trying to reach Home point with Q_WP_SPEED.
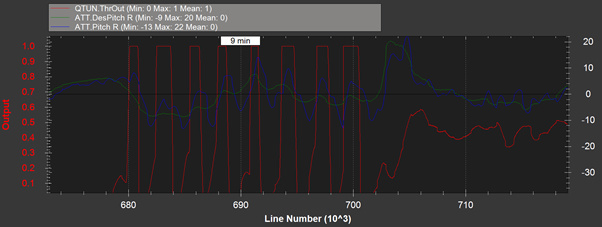
You can also see oscillations in pitch angle due to THR changes.
Any suggestion to improve this behaviour is welcome.
Best Wishes,
Ferit.