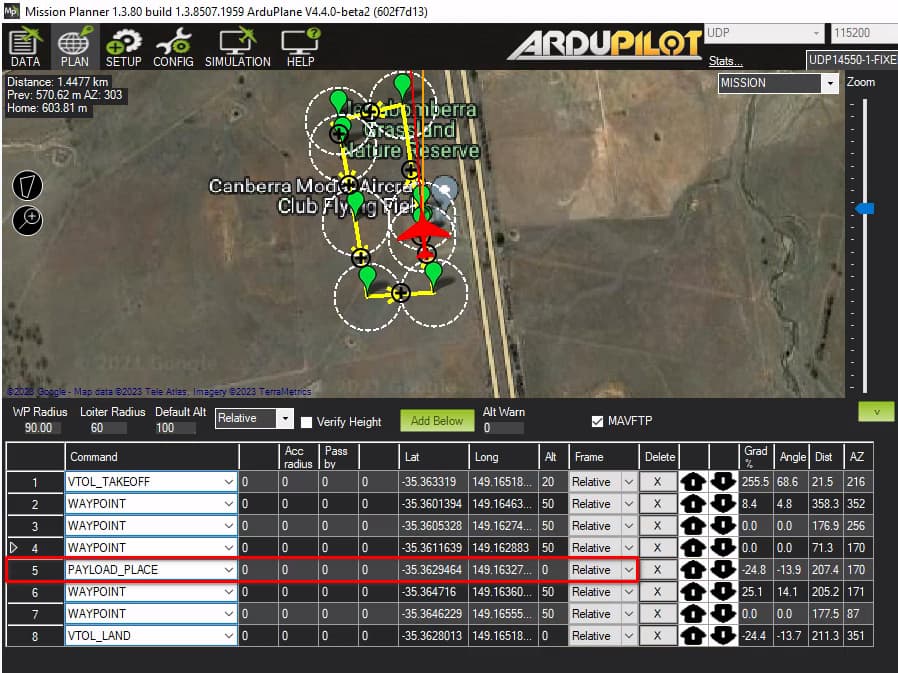
The 4.4beta version of ArduPilot plane firmware has payload place support. This allows for missions where you can drop a package at a location then continue the mission to come home. It is designed for logistics or medical delivery applications.
The above video gives a demonstration in RealFlight with MissionPlanner. The key things you need to know are:
you need to use the 4.4.x beta release of plane or later
you need to enable lua scripting with SCR_ENABLE=1
The PAYLOAD_PLACE mission item is treated like a VTOL landing with all the usual back transition logic, but it has special behaviour where after the package is released the aircraft climbs back up to the approach height and continues the mission.
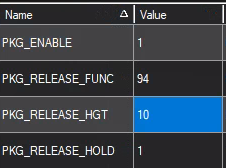
You need to setup parameters like this to setup the payload place lua script:
If you have any questions please ask on this posting!
thank you! That log helped me find the bug and the fix is here:
we should get this merged in a couple of days, and will include the fix in 4.4.0beta3
When you have the fix, some other things you need to do for SITL testing:
Hi I have a question. I am in Ca, using MP the plane home location is in the Midwest and seems hard coded and your Home location is in Africa. How do you guys reset the home location to use imported files nothing seems to reset it, or do i have to close MP and restart.
Yes, of course. Set a chosen RC channel to move a servo between a high and a low position to release the payload. Then, you can engage the drop whenever you want by moving the switch, as long as you have RC signal.
Is this SITL or a real drone?
What are the exact coordinates of the Africa location?
If this is a real drone, which location (CA, the Midwest US one, or the one in West Africa) is the actual correct location of the drone?
Also, can be a simple fix, but sometimes the caches can act up. This might be a simple solution - restart your computer, then restart MP, and see if it gets fixed.
You do not need it to be a RC option specific to payload, you can just use an auxiliary servo and RC channel.
That being said, there is actually something called a “GRIPPER” which is the mechanism ArduPilot uses to control payload delivery. You can check out the documentation here: Grippers (for delivery) — Plane documentation
Is it possible to add functionality to the script to have the option to disarm and delay after landing? Some instances that would require this would be:
Removal of a stubborn cargo item maybe jammed if the LZ was not completely even or clear
If the delivery also requires an onload on the same flight (offload and onload)
If the local authorities require a brief preflight inspection before takeoff
Hi, sorry to bother you. I’d like to know if this RF model and its parameters are available for download. I hope to have some examples as reference settings. Thank you!